Технические науки/12.
Автоматизированные системы управления
Доцент БЕГОЯН К.В.
Национальный политехнический
университет Армении, Ереван, Армения
Определение передаточной функции
понижающего преобразователя постоянного напряжения с сопротивлением в цепи конденсатора
Понижающие преобразователи
постоянного напряжения (ППН) с использованием широтно-импульсной модуляции (ШИМ) сигнала широко применяются в различных технических
приложениях (рис. 1) [1,2]. При достаточно высокой частоте прерывания ![]() , среднее за период
, среднее за период ![]() значение
значение ![]() выходного напряжения
выходного напряжения ![]() равно
равно ![]() , где
, где ![]() есть напряжение
источника питания, а
есть напряжение
источника питания, а ![]() называется коэффициентом заполнения импульсов.
называется коэффициентом заполнения импульсов.
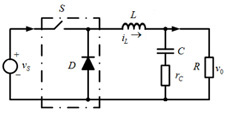
Рис. 1. Схема
понижающего ППН с сопротивлением
В статье дается вывод
передаточной функции понижающего ППН в режиме непрерывных токов при наличии
дополнительного сопротивления ![]() в цепи конденсатора. Знание
этой передаточной функции при малых отклонениях сигналов от их средних значений
необходимо для исследования систем управления (например, систем управления
двигателей постоянного тока), в которых эти преобразователи входят как
управляющие элементы.
в цепи конденсатора. Знание
этой передаточной функции при малых отклонениях сигналов от их средних значений
необходимо для исследования систем управления (например, систем управления
двигателей постоянного тока), в которых эти преобразователи входят как
управляющие элементы.
2. Уравнения динамики ППН в пространстве
состояний. Импульсные ППН с ШИМ являются нелинейными нестационарными
системами с периодическими параметрами. Поэтому точное аналитическое исследование
их динамики является исключительно сложной задачей. На практике обычно
прибегают к специальным приближенным методам, среди которых можно выделить метод,
основанный на таком преобразовании уравнений ППН в пространстве состояний, при
которых эти уравнения правильно описывают усредненную во времени динамику
преобразователя [3].
Выберем в качестве
переменных состояния ППН ток дросселя ![]() и напряжение на
конденсаторе
и напряжение на
конденсаторе ![]() . Тогда, вводя в рассмотрение двумерный вектор-столбец
. Тогда, вводя в рассмотрение двумерный вектор-столбец ![]() с координатами
с координатами ![]() и
и ![]() , для схемы на рис. 1 (т.е. для интервала замыкания ключа
, для схемы на рис. 1 (т.е. для интервала замыкания ключа ![]() ) можно записать
) можно записать
 (1)
(1)
или, в векторно-матричной
форме,
![]() (2)
(2)
где
 (3)
(3)
а входная функция ![]() отражает тот факт,
что напряжение питания
отражает тот факт,
что напряжение питания ![]() может меняться во времени. Соответствующие векторные
уравнения для интервала
может меняться во времени. Соответствующие векторные
уравнения для интервала ![]() , при котором электронный ключ разомкнут, имеют аналогичный
вид
, при котором электронный ключ разомкнут, имеют аналогичный
вид
![]() (4)
(4)
Нетрудно показать, что матрица
![]() и векторы
и векторы ![]() и
и ![]() в (4) даются
выражениями
в (4) даются
выражениями ![]()
Вводя
в рассмотрение функцию переключения ![]() [1,3]
[1,3]
 (5)
(5)
дифференциальные уравнения ППН на рис. 1 можно
записать в виде
![]() (6)
(6)
![]()
которые сводятся, с учетом того,
что ![]() к простому виду
к простому виду
![]() (7)
(7)
Таким образом, нами получены точные дифференциальные уравнения ППН в пространстве состояний (7), зависящие от функции
переключения ![]() (5), значение которой скачкообразно переходит
от единицы к нулю и обратно в моменты замыкания и размыкания электронного
ключа. В соответствии с методом усреднения уравнений динамики в пространстве
состояний, на первом этапе осуществляется усреднение по времени функции
переключения
(5), значение которой скачкообразно переходит
от единицы к нулю и обратно в моменты замыкания и размыкания электронного
ключа. В соответствии с методом усреднения уравнений динамики в пространстве
состояний, на первом этапе осуществляется усреднение по времени функции
переключения ![]() (1) [1]. Для этого вводится функция времени
(1) [1]. Для этого вводится функция времени
 , (8)
, (8)
которая
представляет собой усредненное за период ![]() выражение
для
выражение
для ![]() при непрерывном изменении времени
при непрерывном изменении времени ![]() . Далее осуществляется, с учетом (8), усреднение по времени
точных уравнений динамики (7), что дает
. Далее осуществляется, с учетом (8), усреднение по времени
точных уравнений динамики (7), что дает
 (9)
(9)
где усредненные переменные ![]() ,
, ![]() и
и ![]() определяются
выражениями, аналогичными (8), и предполагается, что вектор
определяются
выражениями, аналогичными (8), и предполагается, что вектор ![]() и функция
и функция ![]() не очень отличаются
от своих усредненных значений [1-3]. Уравнения (9) называются усредненной моделью ППН в пространстве состояний. Для вывода передаточных функций ППН следует осуществить линеаризацию нелинейной
усредненной модели в окрестности некоторой постоянной рабочей точки [1]. Классическая
процедура линеаризации заключается в разложении, считая отклонения от рабочей
точки малыми, нелинейной функции в ряд
Тейлора и пренебрежении всеми членами кроме линейного [4]. Однако вид уравнений
(9) позволяет упростить эту процедуру. Представим все усредненные функции
времени в (9) в виде
не очень отличаются
от своих усредненных значений [1-3]. Уравнения (9) называются усредненной моделью ППН в пространстве состояний. Для вывода передаточных функций ППН следует осуществить линеаризацию нелинейной
усредненной модели в окрестности некоторой постоянной рабочей точки [1]. Классическая
процедура линеаризации заключается в разложении, считая отклонения от рабочей
точки малыми, нелинейной функции в ряд
Тейлора и пренебрежении всеми членами кроме линейного [4]. Однако вид уравнений
(9) позволяет упростить эту процедуру. Представим все усредненные функции
времени в (9) в виде
![]() , (10)
, (10)
где
все отклонения ![]() считаются малыми. Тогда, подставив (10) в (9)
и разделяя переменные, приходим к уравнениям
считаются малыми. Тогда, подставив (10) в (9)
и разделяя переменные, приходим к уравнениям
![]() (11)
(11)
для
постоянных установившихся состояний, и
![]() (12)
(12)
для малых отклонений
переменных усредненной модели от рабочей точки.
Легко видеть, что единственным
нелинейным членом в уравнениях (12) является член, заключенный в квадратные
скобки и содержащий произведение малых величин ![]() и
и ![]() . Пренебрегая этим членом, окончательно получим
линеаризованные уравнения усредненной модели ППН в
виде
. Пренебрегая этим членом, окончательно получим
линеаризованные уравнения усредненной модели ППН в
виде
![]() (13)
(13)
Следуя стандартной методике
получения передаточных функций линейных систем из уравнений в пространстве
состояний [4], нужно осуществить
преобразование Лапласа уравнений (13) при нулевых начальных условиях и
исключить из полученных алгебраических уравнений вектор состояний ![]() , где
, где ![]() - переменная Лапласа. Это дает следующее комплексное уравнение
относительно скалярной выходной переменной
- переменная Лапласа. Это дает следующее комплексное уравнение
относительно скалярной выходной переменной ![]() :
:
![]() , (14)
, (14)
что приводит к двум скалярным
передаточным функциям ППН относительно независимых
входных переменных ![]() и
и ![]() :
:
 (15)
(15)
Как видно из (15),
передаточные функции ![]() и
и ![]() отличаются лишь постоянными
коэффициентами
отличаются лишь постоянными
коэффициентами ![]() и
и ![]() Подставив (3)
в (15) получим
Подставив (3)
в (15) получим
 (16)
(16)
 (17)
(17)
где
 . (18)
. (18)
Таким образом, ППН на рис. 1 описывается передаточными функциями второго порядка,
имеющими в общем случае нуль в точке ![]() , определяемой емкостью
, определяемой емкостью ![]() и сопротивлением
и сопротивлением ![]() в цепи конденсатора. Укажем, что в случае
идеального ППН, т.е. при
в цепи конденсатора. Укажем, что в случае
идеального ППН, т.е. при ![]() , нули передаточных функций отсутствуют [1,2].
, нули передаточных функций отсутствуют [1,2].
Пример. Рассмотрим ППН с параметрами ![]()
![]() ,
, ![]()
![]() . Передаточная функция
. Передаточная функция ![]() (16) при этих
параметрах равна
(16) при этих
параметрах равна
![]() (19)
(19)
и имеет два комплексно-сопряженных
полюса ![]() , а также один нуль
, а также один нуль ![]() . Отметим, что передаточная функция
. Отметим, что передаточная функция ![]() (16) в данном случае
отличается от
(16) в данном случае
отличается от ![]() (19) только
постоянным коэффициентом 0.078125. На рис. 2
показаны диаграммы Боде передаточной функции
(19) только
постоянным коэффициентом 0.078125. На рис. 2
показаны диаграммы Боде передаточной функции ![]() (19). Как видно из
рис. 2, фазовая характеристика
(19). Как видно из
рис. 2, фазовая характеристика ![]() идеального ППН при
идеального ППН при ![]() стремится к
стремится к ![]() , т.е. наличие сопротивления
, т.е. наличие сопротивления ![]() улучшает запасы
устойчивости понижающего ППН, что, в свою очередь, приводит к лучшим
динамическим характеристиками преобразователя (в случае идеального ППН, т.е.
при
улучшает запасы
устойчивости понижающего ППН, что, в свою очередь, приводит к лучшим
динамическим характеристиками преобразователя (в случае идеального ППН, т.е.
при ![]() , фазовая характеристика
, фазовая характеристика ![]() при
при ![]() стремится к
стремится к ![]() ). Данное обстоятельство имеет важное значение при
использовании ППН в замкнутом контуре систем управления.
). Данное обстоятельство имеет важное значение при
использовании ППН в замкнутом контуре систем управления.
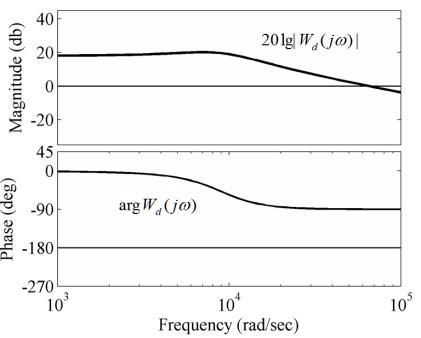
Рис. 2. Диаграммы Боде понижающего ППН с передаточной
функцией (19)
СПИСОК ЛИТЕРАТУРЫ
1. Choi B., Pulse-width Modulated DC-to-DC Power: Conversion Circuits, Dynamics,
and Control Designs, A John Wiley and Sons,
Inc., Hoboken, New Jersey, 2008, 649 pp.
2. Mohan
N., M. Tore, P. Willam, Power
Electronics: Converters, Applications, and Design, John Wily and Sons, Ltd,
New York, 2002, 802 pp.
3. Middlebrook R., Cuk S., A General Unified Approach to Modeling
Switching Converter Power Stages, IEEE Power Electronics Specialists Conference Record, pp. 18-34, 1976.
4. Dorf R.,
Bishop R. Modern Control Systems. Addison-Wesley Publishing Co.,
Reading, MA, 2007. 1046 pp.