Технические науки/12.
Автоматизированные системы управления на производстве.
К.т.н. Уликян
А.Т., аспирант Оганян О.Г.
Национальный
политехнический университет Армении, Армения
Проектирование простых симметричных систем
автоматического регулирования
Рассмотрим ![]() -мерную линейную многомерную систему на рис. 1, где
-мерную линейную многомерную систему на рис. 1, где ![]() - передаточная матрица объекта регулирования
размера
- передаточная матрица объекта регулирования
размера ![]() , а
, а ![]() - передаточная
матрица регулятора того же размера.
- передаточная
матрица регулятора того же размера.

Рис. 1. Матричная структурная схема линейной МСАР
Допустим, передаточная матрица ![]() является простой
симметричной, т.е. передаточные функции всех диагональных элементов одинаковы
и, кроме того, все передаточные функции недиагональных элементов также
одинаковы [1, 2]. Если обозначить через
является простой
симметричной, т.е. передаточные функции всех диагональных элементов одинаковы
и, кроме того, все передаточные функции недиагональных элементов также
одинаковы [1, 2]. Если обозначить через ![]() диагональные, а через
диагональные, а через
![]() все остальные элементы, то простая симметричная матрица
все остальные элементы, то простая симметричная матрица ![]() может быть записана в
виде:
может быть записана в
виде:
 . (1)
. (1)
Как известно [1,2], передаточная матрица ![]() (1) имеет при любом
числе каналов
(1) имеет при любом
числе каналов ![]() только две различные
одномерные характеристические системы, имеющие вид:
только две различные
одномерные характеристические системы, имеющие вид:
![]() (2)
(2)
![]() . (3)
. (3)
В теории многосвязного регулирования [1,
2] функции ![]() (2) обычно называют
передаточными функциями усредненного
движения, а все остальные функции
(2) обычно называют
передаточными функциями усредненного
движения, а все остальные функции ![]() (
(![]() ) (3) – относительного
движения. Подчеркнем, что все характеристические передаточные функции (ХПФ)
) (3) – относительного
движения. Подчеркнем, что все характеристические передаточные функции (ХПФ)
![]() (2) и (3) являются обычными
передаточными функциями с действительными коэффициентами [4].
(2) и (3) являются обычными
передаточными функциями с действительными коэффициентами [4].
Известно [2], что если многомерный объект
регулирования описывается простой симметричной матрицей ![]() (1), то в качестве
регулятора
(1), то в качестве
регулятора ![]() целесообразно
использовать регулятор, передаточная матрица которого также является простой
симметричной, т.е. имеет вид (1), где передаточные функции
целесообразно
использовать регулятор, передаточная матрица которого также является простой
симметричной, т.е. имеет вид (1), где передаточные функции ![]() и
и ![]() следут заменить на
следут заменить на ![]() и
и ![]() . ХПФ
. ХПФ ![]() матрицы
матрицы ![]() при этом будут иметь
вид
при этом будут иметь
вид
![]() (4)
(4)
![]() , (5)
, (5)
а ХПФ ![]() разомкнутой
скорректированной системы
разомкнутой
скорректированной системы ![]() запишутся в виде
запишутся в виде
![]() . (6)
. (6)
Отметим, что все ХПФ ![]() ,
, ![]() и
и ![]() простой симметричной
системы имеют вид (2)-(5), т.е. для каждой из матриц
простой симметричной
системы имеют вид (2)-(5), т.е. для каждой из матриц ![]() ,
, ![]() и
и ![]() имеются только две
различные ХПФ с действительными
коэффциентами. Поэтому в данном случае достаточно легко определить передаточные
функции
имеются только две
различные ХПФ с действительными
коэффциентами. Поэтому в данном случае достаточно легко определить передаточные
функции ![]() и
и ![]() регулятора
регулятора ![]() по найденным на
основании известных методов классической теории регулирования [4]
"желаемым" ХПФ регулятора
по найденным на
основании известных методов классической теории регулирования [4]
"желаемым" ХПФ регулятора ![]() в (6). Действительно,
из (4), (5), после несложных преобразований имеем следующие простые выражения:
в (6). Действительно,
из (4), (5), после несложных преобразований имеем следующие простые выражения:
 (7)
(7)
Таким образом, проектирование матричного
регулятора для простой симметричной САР произвольной размерности фактически
сводится к расчету двух обычных одномерных систем стандартными методами.
Пример. Рассмотрим простой симметричный объект размера ![]() с передаточной
матрицей
с передаточной
матрицей
 , (8)
, (8)
где
 .
.
ХПФ
усредненного движения (2) при этом имеет вид:
 , (9)
, (9)
а обе ХПФ относительного движения одинаковы и имеют,
исходя из уравнений (3), вид:
 . (10)
. (10)
Можно показать, устойчивость данной простой
симметричной системы без коррекции определяется ХПФ ![]() (10). Запасы
устойчивости по амплитуде и фазе системы, определяемые по годографу
(10). Запасы
устойчивости по амплитуде и фазе системы, определяемые по годографу ![]() , при этом равны:
, при этом равны: ![]() дб и
дб и ![]() .
.
Выберем теперь такой матричный регулятор,
при котором ХПФ ![]() усредненного движения
скорректированной системы останется без изменения, т.е. будет совпадать с
усредненного движения
скорректированной системы останется без изменения, т.е. будет совпадать с ![]() [что соответствует
[что соответствует ![]() ], а коррекция
], а коррекция ![]() ХПФ относительного
движения будет определяться передаточной функцией
ХПФ относительного
движения будет определяться передаточной функцией
![]() , (11)
, (11)
имеющей полюс в -0.004 и нуль в -0.025. Передаточная
функция ![]() (11) рассчитана на
основе стандартных методов [4], исходя из условия повышения запасов
устойчивости по амплитуде и фазе характеристических систем относительного
движения до значений
(11) рассчитана на
основе стандартных методов [4], исходя из условия повышения запасов
устойчивости по амплитуде и фазе характеристических систем относительного
движения до значений ![]() дб и
дб и ![]() .
.
Подставив ![]() и выражение для
и выражение для ![]() (11) в (7), получим
(11) в (7), получим
![]() , (12)
, (12)
Как видно из (12), требуемые взаимные
связи ![]() компенсатора
компенсатора ![]() описываются реальным
дифференцирующим звеном. Характеристические годографы скорректированной системы
с передаточными функциями матричного регулятора
описываются реальным
дифференцирующим звеном. Характеристические годографы скорректированной системы
с передаточными функциями матричного регулятора ![]() и
и ![]() (12) показаны на рис.
2, где более тонкие линии соответствуют годографам
(12) показаны на рис.
2, где более тонкие линии соответствуют годографам ![]() и
и ![]() .
.
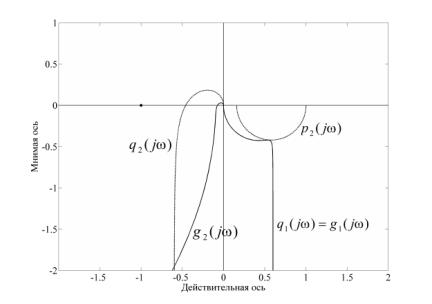
Рис. 2. Характеристические годографы скорректированной
системы
Литература:
1. Gasparyan O.N. Linear and Nonlinear Multivariable Feedback
Control: A Classical Approach, John Wiley & Sons, UK, 2008, 356 P.
2. Гаспарян О.Н. Теория
многосвязных систем автоматического регулирования, ГИУА, Ереван, Изд-во
«Асогик», 2010, 380 с.
3. Хорол Д.
М., Барский А. Г., Орлова М. С. Динамические
системы с одноканальными измерителями.- М.: Машиностроение, 1976.
4. Бесекерский В.А.,
Попов Е.П. Теория систем автоматического
регулирования, М.: Наука, 2003, 560 с.