Васильев
Иван Анатольевич
Санкт-Петербург,
ЦНИИ РТК, нач. лаб., к.т.н
Локализация
МОБИЛЬНОГО РОБОТА с использованием бесплатформенной инерциальной навигационной
системы (БИНС)
«Инерциальная навигация — метод определения
координат и параметров движения различных объектов (судов, самолётов, ракет и
др.) и управления их движением, основанный на свойствах инерции тел и
являющийся автономным, т. е. не требующим наличия внешних ориентиров или
поступающих извне сигналов» [1, 3, 4].
БИНСы,
применяемые в робототехнике используют в своём составе, как правило, шесть
датчиков. Три – линейного ускорения (датчик линейного ускорения – ДЛУ) и три –
угловой скорости (датчик угловой скорости – ДУС).
Для
робота, снабжённого качественными одометрами (датчиками колёс) ДЛУ не дадут
требуемой точности, поэтому их применение очень ограничено. Но для
криволинейного движения требуется применять ДУС. С каждого ДУС поступает на
робота значение угловой скорости w. Расчёт угла
производится путём интегрирования угловой скорости:
Ai+1 = Ai + wi Δt (1)
где Аi+1 – текущий угол;
Аi – предыдущий угол;
wi – отмасштабированное
показание ДУС;
Δt – дискрета времени.
Формула
(1) отражает идеальную ситуацию, когда в случае покоящегося робота угловая
скорость w, поступающая с ДУС, строго равна нулю. В
реальности это совсем не так – см. рисунок 4.2.1
На этом
рисунке приведён график информации, поступающей с датчика угловой скорости в
покое. По оси абсцисс отложено время в секундах, по оси ординат – величина
угловой скорости. Дискретность угловой скорости связана с тем, что датчик даёт
целое число, измеренное в 1/8 угловых градуса в секунду.
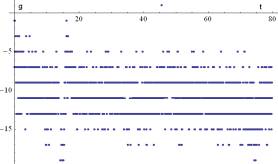
Рисунок 4.2.1 – Типичная картина информации,
поступающей с ДУС
Здесь видно, что даже в состоянии покоя
ДУС не выдаёт нуль. Следовательно, время от времени требуется проводить
калибровку. Так как далее это значение будет интегрироваться, т.е.
суммироваться, было бы неверно в процессе калибровки находить лишь среднее
значение угловой скорости, так как небольшая погрешность, при определении
среднего, даст большую при интегрировании. Здесь предлагается находить
параметры проинтегрированной угловой скорости, полученной в покое.
Рассмотрим
график на рисунке 4.2.2.
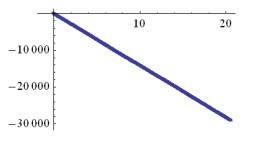
Рисунок 4.2.2 – Проинтегрированные показания ДУС
Здесь
также по горизонтальной оси отложено время в секундах, а по вертикали –
интегрированная скорость, которую, в нашем случае, можно назвать углом. Было
установлено, что это – прямая с хорошей точностью. Выведем формулы определения
параметров этой прямой.
Для
уравнения прямой ![]() , используя МНК (метод наименьших квадратов), можно получить
следующие формулы:
, используя МНК (метод наименьших квадратов), можно получить
следующие формулы:

где (4.2.2)


N
– количество отсчётов;
tj
– j-тый момент времени;
ωj – j-тое показание ДУС.
Для иллюстрации того, что параметры прямой
рассчитываются верно, приведём рисунок 4.2.3, на котором тонкая прямая
вычисляется по параметрам, найденным по формулам (4.2.2).
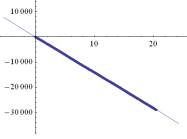
Рисунок 4.2.3 – Аппроксимация массива точек
прямой
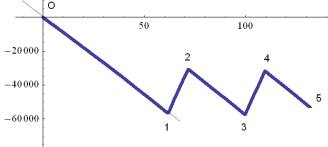
Рисунок 4.2.4 – Демонстрация реальных поворотов
робота
На рисунке
4.2.4 продемонстрирован график интегрированных показаний ДУС для поворотов
робота. От точки О до точки 1 – робот в покое, от точки 1 до точки 2 робот
поворачивается на +90 градусов, далее, от точки 2 до 3 – робот опять покоится,
от 3 до 4 – опять поворот на +90 градусов и т.д.
Для того,
чтобы учесть смещение нуля при повороте, требуется во время поворотов от
вычисленного значения вычесть интегрированное за время стоянки смещение нуля,
вычисляемое по формуле ![]() , с параметрами, вычисленными по формулам (4.2.2).
, с параметрами, вычисленными по формулам (4.2.2).
Итак, алгоритм действия такой:
0.
На каждом такте
управления производится:
a.
К счётчику времени st прибавляется период, прошедший с предыдущего такта;
b.
К сумматору ДУС ![]() прибавляется текущее
показание угловой скорости;
прибавляется текущее
показание угловой скорости;
1.
Робот
остановился, то есть, скорости от ненулевых стали нулевыми. Устанавливаются в ноль:
a.
Счётчик времени st;
b.
Счетчик тактов;
c.
Сумматор ДУС ![]() ;
;
2.
Скорости
нулевые. Производится вычисление (см. формулы (4.2.2)):
a.
sumx2i;
b.
sumy2i1;
c.
sumx2i1;
d.
sumy2ix2i;
e.
sumsqrx2i;
3.
Скорости
стали ненулевыми. Производится вычисление (см. формулы (4.2.2)) параметров a и b;
4.
Скорости
ненулевые – робот едет. Производится вычисление текущего угла по формулам:
![]()
![]()
где ![]() нужно по той
причине, что в п. 1 сумматоры и счётчики сбрасываются в ноль;
нужно по той
причине, что в п. 1 сумматоры и счётчики сбрасываются в ноль;
5.
По прошествии некоторого времени
требуется остановить робот для перекалибровки. При этом последовательно будут
выполняться пп. 1-3.
Список литературы
1.
Springer handbook of robotics // под. ред. Bruno Siciliano,
Oussama Khatib, «Springer», 2008.
2. Васильев
И. А. Управление траекторным движением мобильных роботов разных колёсных
схем. // «Экстремальная робототехника». Сборник докладов международной
научно-технической конференции, 23-25 ноября 2011
3. Бурдаков
С. Ф., Мирошник И. В., Стельмаков Р. Э. Системы управления движением
колесных роботов. СПб; «Наука», 2001.
4. http://ru.wikipedia.org/wiki/Инерциальная
навигационная система