Технические науки/4. Транспорт
Гончаров А.В., д.т.н., проф. Костоглотов А.А., к.т.н., проф.
Решенкин А.С.
Донской государственный технический
университет, Россия
Силоизмерительная система
Решение задач по
повышению эффективности функционирования элементов оборудования и
совершенствованию их конструкций требует обладания информацией об внутренних
усилиях и нагрузках, возникающих в них при работе. При постановке такого рода задач выделяются по существу следующие
шаги: выбор подходящего способа измерения силы и выбор подходящей
силоизмерительной системы. Особенностью исследовательских работ при
совершенствовании опытных конструкций является, зачастую, невозможность
применения стандартных силоизмерителей. Это часто обусловлено в первую очередь
специфическими конструктивными особенностями оборудования и характером
требуемой информации.
Наиболее эффективным способом бесконтактного определения величины
крутящего момента приводного вала работающего механизма является метод, в
основе которого, лежит хорошо известный эффект Холла [1].
Для реализации метода
разработана экспериментальная установка, общий вид которой показан на рисунке 1,
включающая в себя: механизм вращения 1 с тормозным устройством и измерительный
комплекс 2. На рисунке 2 представлено взаимное положение испытуемого образца 3
и устанавливаемых на определенном расстоянии по его длине датчиков Холла 4.
Датчики чувствительны только к направлению магнитного поля и нечувствительны к
его напряженности, благодаря этому возможен большой воздушный зазор (до 30 мм).
На самом валу (3) в зоне установки
датчиков закрепляются постоянные магниты.
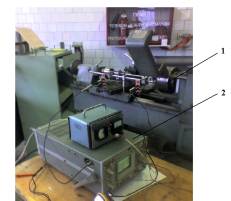
Рисунок 1
- Общий вид экспериментальной установки
Рисунок 2 - Положение образца и датчиков
При протекании тока
через датчики Холла и при воздействии на них магнитного поля (от постоянных
магнитов на вращающемся валу), перпендикулярного плоскости датчиков, возникает
напряжение Холла, перпендикулярное протекающему току и пропорциональное
магнитному потоку, регистрируемое в виде импульсов.
При вращении вала без
нагрузки, от датчиков Холла поступают два согласованных сигнала на
регистрирующие приборы. При приложении к валу нагрузки, тормозящего момента,
осуществляется скручивание вала в упругой области, при этом происходит
рассогласование сигналов, поступающих с датчиков Холла (рисунки 3-6). По
величине расхождения сигналов и таррировочному графику, представленному на рисунке 7, определяется
угол закручивания вала.


Рисунок 3 - ∆ ℓ=0 Ms при ф=0'
Рисунок 4 - ∆ ℓ=2,2*5 Ms при ф=10'


Рисунок 5 - ∆ ℓ=3,5*5 Ms при
ф=20' Рисунок 6 - ∆
ℓ=5,8*5 Ms при ф=30'
Рисунок 7-
Зависимость разницы между сигналами датчиков Холла (l) от угла закручивания
(ф).
Для нахождения искомой
зависимости момента вращения вала от его угла закручивания, при разных
нагрузках можно воспользоваться следующими соотношениями:
![]()
(1)
![]()
где - момент вращения вала;
![]() - касательное напряжение в поперечном сечении вала;
- касательное напряжение в поперечном сечении вала;
![]()
- полярный момент сопротивления поперечного сечения вала;
Т.к.
(2)
и , (3)
 то искомое
выражение для крутящего момента будет следующим:
то искомое
выражение для крутящего момента будет следующим:
, (4)
![]()
![]() где - модуль сдвига;
где - модуль сдвига;
![]() - угол закручивания;
- угол закручивания;
![]() - диаметр вала;
- диаметр вала;
- длина вала.
Представленный в докладе,
метод бесконтактного определения величины крутящего момента приводного вала
работающего механизма, позволяет повысить эффективность работы элементов
оборудования за счет получения достоверной информации о нагрузках, возникающих
в них при работе. Благодаря разработанному методу устанавливаются
корреляционные зависимости между измеряемыми сигналами и действующими на
образцы нагрузками при работе, что позволяет разрабатывать систему текущего
контроля передаваемого валом усилия, тем самым, способствуя предупреждению
поломок и неисправностей оборудования.
Литература:
1. Илюкович А.М.
Эффект Холла и его применение в измерительной технике / «Измерительная
техника», 1960, № 7.