Технические науки
РЕАЛИЗАЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ
АСИНХРОНИЗИРОВАННЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ НА БАЗЕ
КОНТРОЛЛЕРА TMS320F28335
Волков А. В, Лапшина В.А.
ФГБОУВПО «Мордовский
государственный университет им. Н. П. Огарева»,
г. Саранск
E-mail: elsoldador@rambler.ru
Аннотация. Рассматривается возможность применения контроллера
TMS320F28335 для управления асинхронизированным вентильным двигателем.
Ключевые
слова: двигатель, асинхронный
двигатель, векторное управление, микроконтроллер, преобразователь частоты.
Постановка задачи
На сегодняшний день, все более необходимо
развитие энерго - и ресурсосберегающих технологий. Тенденциями развития
технологий являются миниатюризация изделий, комплексная автоматизация производства,
и поддержка достижений в области современной силовой электроники, в частности,
создание силовых интеллектуальных модулей с прямым процессорным управлением. По
самым скромным оценкам на одного жителя земли в ближайшее время будет
проходиться 10 электрических двигателей, из которых, по крайней мере, один
потребует качественного регулирования скорости. Таким образом, рынок
встраиваемых микроконтроллерных систем управления двигателями имеет устойчивые
тенденции к росту.
Выбор
и решение поставленной задачи
Реализация поставленной задачи заключается
в выборе метода управления двигателем. На сегодняшний день существует
достаточно много способов управления. В последнее десятилетие самым
перспективным является векторное управление электроприводом, так как при таком
способе достигается наибольшая экономия электроэнергии.
Рассмотрим векторный метод управления асинхронными двигателями
(Рисунок 1) [1]. В наблюдателе состояния системы управления осуществляется
преобразование числа фаз токов статора и ротора и их перевод в синхронную
систему координат x, y. Затем проводится аппроксимация функции вида «кривая
намагничивания» степенным рядом
![]() (1)
(1)
и определяется значение модуля основного
магнитного потока, соответствующее суммарному значению токов намагничивания.
Электромагнитный момент вычисляется в блоке вычислителя момента (ВМ) с учетом ![]() ,
, ![]() . Для управления фазой тока статора необходимо непрерывно
определять значение угла опережения коммутации
. Для управления фазой тока статора необходимо непрерывно
определять значение угла опережения коммутации ![]() , который задает угол сдвига фаз
, который задает угол сдвига фаз ![]() между векторами тока
и напряжения статора. При этом инвертор тока в ПЧ статора работает в режиме
искусственной коммутации тиристоров. Блок регуляторов имеет в своем составе
регуляторы скорости, момента, основного магнитного потока и ортогональных
составляющих токов статора и ротора.В блок параметров базовой машины вводятся
значения активных сопротивлений обмоток статора
между векторами тока
и напряжения статора. При этом инвертор тока в ПЧ статора работает в режиме
искусственной коммутации тиристоров. Блок регуляторов имеет в своем составе
регуляторы скорости, момента, основного магнитного потока и ортогональных
составляющих токов статора и ротора.В блок параметров базовой машины вводятся
значения активных сопротивлений обмоток статора ![]() и ротора
и ротора ![]() , индуктивностей рассеяния
, индуктивностей рассеяния ![]() и
и ![]() и коэффициентов потерь от вихревых токов
и коэффициентов потерь от вихревых токов ![]() и от гистерезиса
и от гистерезиса ![]() . При управлении асинхронным двигателем (АД ) с малыми
значениями частоты тока ротора (
. При управлении асинхронным двигателем (АД ) с малыми
значениями частоты тока ротора (![]() <
<![]() ) и ограничением перегрузочной способности преобразователя по
току на уровне
) и ограничением перегрузочной способности преобразователя по
току на уровне ![]() , параметры
, параметры ![]() ,
, ![]() ,
, ![]() можно принять
постоянными. Если в рабочих режимах электропривода частота тока ротора и
амплитуда тока статоры выходят за пределы установленных выше ограничений, то
для адекватного описания динамических процессов в системе уравнений будет
необходимо учесть их статические зависимости
можно принять
постоянными. Если в рабочих режимах электропривода частота тока ротора и
амплитуда тока статоры выходят за пределы установленных выше ограничений, то
для адекватного описания динамических процессов в системе уравнений будет
необходимо учесть их статические зависимости ![]() ,
, ![]() ,
, ![]() ,
, ![]() , полученные на уточненной модели АД с учетом его конструкции.
, полученные на уточненной модели АД с учетом его конструкции.
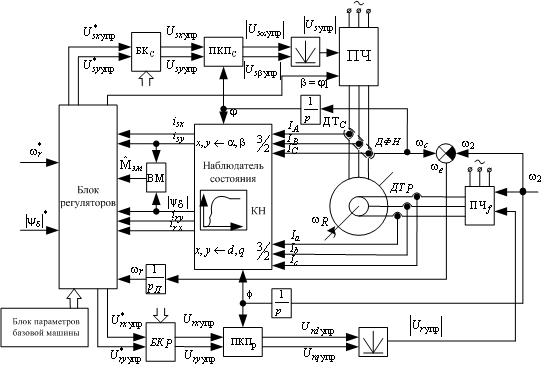
Рисунок 1
– Функциональная схема системы векторного управления
машинно-вентильным
комплексом АВД с учетом потерь в стали
Причем наиболее существенной является ее
составляющая ![]() , т.е. потери в стали пропорциональны квадрату
потокосцепления взаимоиндукции и квадрату синхронной частоты.
, т.е. потери в стали пропорциональны квадрату
потокосцепления взаимоиндукции и квадрату синхронной частоты.
Таким образом, для создания полноценной
системы управления необходимо знать в каких пределах могут изменяться основные
параметры двигателя. Так же очень важно правильно выбрать оборудование для
более точного определения значения измеряемых и интересующих нас величин. С
этой целью необходимо провести анализ огромного рынка технического
оборудования, который существует на сегодняшний день.
Выбор
контроллера и реализация системы управления
Функции прямого цифрового управления в
современным приводах реализуются за счет использования специализированных
периферийных устройств, интегрированных непосредственно на кристалл
микроконтроллера, и не требующих дополнительных развитых средств сопряжения, а
также за счет высокопроизводительной архитектуры и системы команд центрального
процессора, позволяющей решать большинство типовых задач управления двигателями
программным способом (регуляторы, наблюдатели, преобразователи координат и
т.п.).
Построение сложных систем управления стало
возможным благодаря высокопроизводительным и недорогим микропроцессорам
цифровой обработки сигналов. Текущее развитие цифровой обработки сигналов для
целей управления идет по следующим направлениям [2]:
1.
Повышение тактовой
частоты и производительности центрального процессора (до 100-400 млн.оп./с),
расширения числа функций системы управления, реализуемых исключительно
программным путем.
2.
Переход от традиционной
Фон-Неймановской архитектуры центрального процессора к более производительной
многошинной конвейерной архитектуре, в частности, модифицированной Гарвардской,
переход от обычных микроконтроллеров к сигнальным микроконтроллерам.
3.
Увеличение объема
встроенной памяти на кристалле: программ (до 128 Кслов) и данных (до 18 и более
Кслов).
4.
Оптимизация трансляторов
с языком высокого уровня по объему кода и быстродействию; отказ трудоемкого
программирования на ассемблере и перехода к разработке и отладке программного
обеспечения непосредственного на языке высокого уровня С/С++ в интегрированных
компьютерных средах.
5.
Разработка
микроконтроллеров с поддержкой большинства интерфейсов и широким набором
специализированных периферийных устройств, адаптированных к задачам управления
в области применения.
Для работы в
качестве промышленной ЭВМ может быть выбрано оборудование фирмы Texas
Instruments, а в качестве основного вычислителя плата TMS320F28335 eZdsp на базе сигнального процессора с плавающей
запятой TMS320f3228, снабженная комплектом навесных модулей ввода/вывода
аналоговых и дискретных сигналов. Структурная схема двухпроцессорного
устройства управления регулируемым электроприводом представлена на рисунке 2 и
включает в себя[3]:
1.
Основной (host)
процессор который выполняет функции загрузки DSP процессора, контроля,
диагностики, технологической автоматики, сопряжения с технологическим пультом
управления, терминалом и внешней ЭВМ.
2.
Дополнительный
быстродействующий процессор на базе сигнального процессора, который берет на
себя все задачи, требующего большого объема вычислении с использованием
операций умножения, деления и других нелинейных преобразований, характерных для
векторных систем управления.
3.
Устройства сопряжения, с
объектом разделенные на несколько групп:
·
«медленные»,
предназначенные для сопряжения с внешней технологической автоматикой – ввод и
вывод внешней автоматики и защит привода;
·
«быстрые»,
обеспечивающие ввод в сигнальный процессор мгновенных значений токов и
напряжений выпрямителя, инвертора и возбудителя, а также вывод логических
сигналов управления;
4.
Устройства сопряжения, с
объектом разделенные на несколько групп:
·
«медленные»,
предназначенные для сопряжения с внешней технологической автоматикой – ввод и
вывод внешней автоматики и защит привода;
·
«быстрые»,
обеспечивающие ввод в сигнальный процессор мгновенных значений токов и
напряжений выпрямителя, инвертора и возбудителя, а также вывод логических
сигналов управления;
·
блок преобразования и
нормализации аналоговых сигналов от датчиков тока и напряжения.
5.
Аппаратные защиты
привода:
·
аппаратные защиты в
составе блока преобразования и нормализации аналоговых сигналов, воздействующие
на отключение входного выключателя и индуцирующих
последовательность действий для работы микропроцессорного устройства в
аварийных режимах;
·
сторожевой таймер,
воздействующий на отключение входного выключателя при отказе микропроцессорного
устройства управления, в том числе и по причине сбоев программного обеспечения;
·
операторский интерфейс
терминала системы управления в составе алфавитно-цифрового дисплея и
функциональной клавиатуры, обеспечивающий ввод параметров настройки,
отображение текущих режимных параметров работы регулируемого привода и т.д.
Система управления АВД была создана на
базе специализированного сигнального микроконтроллера TMS320F28335 фирмы Texas
Instruments[4]. Контроллер имеет высокую производительность (до 150 млн.
операций в секунду) и обладает уникальным набором встроенных периферийных
устройств. Периферия контроллера оптимизирована для решения задач прямого
цифрового управления в реальном времени, вплоть до аппаратной поддержки
операционных систем реального времени.
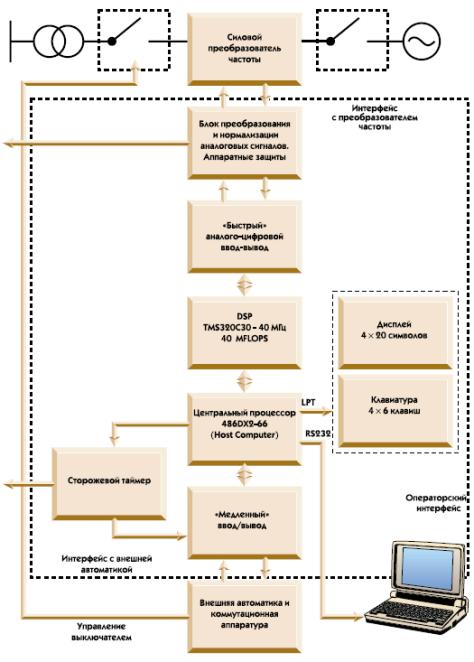
Рисунок 2
– Структура системы управления регулируемого привода
Высокое быстродействие и стандартизация
интерфейсов контроллера позволяет применять его в системах скалярного и
векторного управления асинхронными, синхронными, шаговыми и
вентильно-индукторными двигателями. Контроллер обеспечивает оптимальный
интерфейс с силовыми ключами преобразователей, поддерживая режимы
синусоидальной векторной широтно-импульсной модуляции для мостовых инверторов,
а также прямой цифровой интерфейс с датчиками положения различного типа:
индуктивными, импульсными, на элементах Холла и др. Высокая производительность
процессора допускает реализацию бездатчиковых систем управления двигателями.
Уникальной особенностью контроллера является наличие сразу двух интерфейсов с 6
ключевыми инверторами напряжения, что позволяет создавать преобразователи
частоты для тяжелых условий эксплуатации с рекуперацией энергии торможения в
сеть для лифтов, кранов, шахтных подъемников, электрического транспорта. Ядро
контроллера допускает разработку и отладку программного обеспечения
непосредственно на языке высокого уровня С/С++ при высокой эффективности
создаваемого компилятором кода. При этом модели двигателей, наблюдатели,
регуляторы и цифровые фильтры могут быть полностью реализованы на языке С, что
ускоряет разработку. Блок - схема контроллера представлена на рисунке 3.
Рисунок 3
– Структура системы управления регулируемого привода
Вывод
Рассмотренный выше способ управления и выбранный
контроллер позволяют реализовать энергоэффективную систему электропривода
с ассинхронным вентильным двигателем.
Литература
1.
Гуляев
И. В. Системы векторного управления электроприводом на основе асинхронного
вентильного двигателя / И.В. Гуляев, Г.М. Тутаев. – Саранск: Изд-во Мордов.
ун-та, 2010. – 200 с.
2.
Тутаев,
Г.М. Математическая модель двигателя двойного питания при векторном управлении
/ Г.М Тутаев, А.Н. Ломакин // Изв. ВУЗов. Электромеханика. − 2007.
− №5. − С. 8–14.
3.
http://www.cta.ru/cms/f/326730.pdf
4.
Козаченко
В. Ф., Обухов Н. А., Трофимов С. А.,Чуев П. В. Применение DSP-микроконтроллеров
фирмы Texas Instruments в преобразователях частоты «Универсал» с системой
векторного управления // Электронные компоненты. № 4. 2002.