Технические
науки/
12.
Автоматизированные системы управления на производстве.
Д.т.н. Теличко Л.Я., к.т.н. Корчагина В.А., главный специалист по
электрооборудованию ОАО «НЛМК» Корчагин А.А.
Липецкий
государственный технический университет
СРАВНЕНИЕ ЭНЕРГЕТИЧЕСКИХ
ХАРАКТЕРИСТИК СИСТЕМ ДВУХДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА МЕХАНИЗМА КАНТОВАНИЯ
СТАЦИОНАРНЫХ РОТОРНЫХ
ВАГОНООПРОКИДЫВАТЕЛЕЙ
На сегодняшний день наиболее эффективным
механизмом для разгрузки сыпучих материалов из железнодорожного транспорта
является комплекс вагоноопрокидывателя. В таких механизмах применяется
двухдвигательный электропривод с разомкнутой по скорости параметрической
системой управления с асинхронными электродвигателями с фазным ротором (АДФР), обеспечивающий
равномерную загрузку двигателей в статических режимах. Основными недостатками существующей
системы электропривода являются не обеспечение требуемых динамических и
статических показателей, повышенное энергопотребление. При опрокидывании
вагонов с использованием данной системы происходит образование в механических
элементах значительных динамических нагрузок. В настоящее время существует
тенденция применения электродвигателей с короткозамкнутым ротором (АДКЗ),
которые обладают простой и надежной конструкцией.
Рассмотрим
систему двухдвигательного электропривода на
базе прямого управления моментом (ПУМ) c активным выпрямителем напряжения (АВН). Система была
построена на базе однодвигательных электроприводов ПУМ. Для обеспечения
рекуперации энергии в сеть в тормозных режимах используется АВН, рассчитанный
на двойную мощность автономного инвертора каждого из двигателей, тем самым
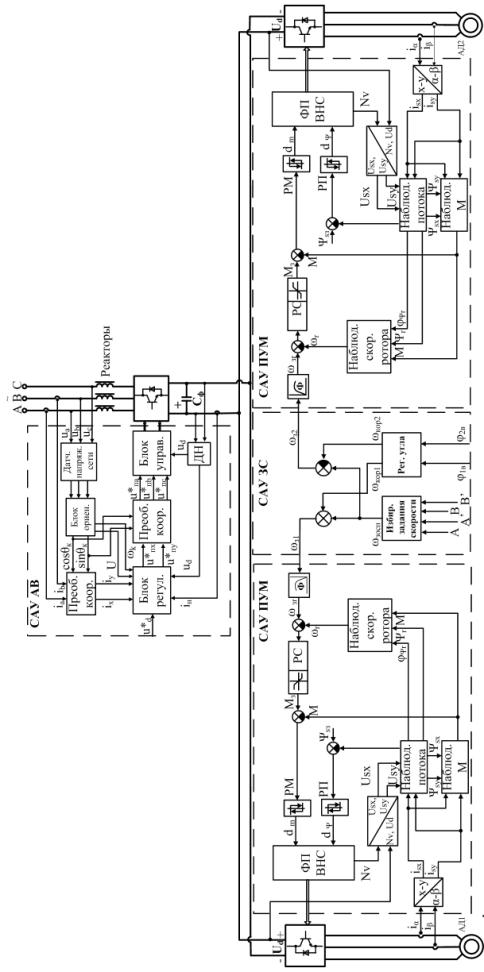
обеспечивая номинальные параметры для элементов схемы АВН. Структурная схема
представлена на рис.1. Элементом схемы на рис.1, не описанным в [1], является
система автоматического управления заданием скорости (САУ ЗС). Входными
сигналами для блока формирования задания скорости являются ωз1
и ωз2. Основной (несущий) сигнал задания ωзосн
формируется в зависимости от положения вагона согласно алгоритму представленному
следующим выражением:
 (1)
(1)
где  ,
,  ,
,  ,
,  – сигналы с датчиков положения вагона; ωзосн – задание скорости.
– сигналы с датчиков положения вагона; ωзосн – задание скорости.
Алгоритм работы
блока избирателя задания скорости использует входные сигналы  ,
,  ,
,  ,
,  с датчиков положения вагона
в “бочке” ротора вагоно-опрокидывателя. Индуктивный датчик, формирующий сигналы
с датчиков положения вагона
в “бочке” ротора вагоно-опрокидывателя. Индуктивный датчик, формирующий сигналы
 и
и  , расположен в боковой “привалочной” стенке; индуктивный датчик, формирующий
сигналы
, расположен в боковой “привалочной” стенке; индуктивный датчик, формирующий
сигналы  и
и  , расположен на верхних упорах (рис.2). Датчики двухпозиционные
формируют сигналы
, расположен на верхних упорах (рис.2). Датчики двухпозиционные
формируют сигналы  и
и
 при большем расстоянии от датчика до вагона,
а сигналы
при большем расстоянии от датчика до вагона,
а сигналы  и
и  при меньшем расстоянии.
Расстояния срабатывания датчика настраиваются в процессе наладки системы.
при меньшем расстоянии.
Расстояния срабатывания датчика настраиваются в процессе наладки системы.
Появление сигнала  формирует задание скорости
ωз, и ротор вагоно-опрокидывателя вращается на повышенной
скорости (обеспечение снижения времени цикла выгрузки вагона). Сигнал
формирует задание скорости
ωз, и ротор вагоно-опрокидывателя вращается на повышенной
скорости (обеспечение снижения времени цикла выгрузки вагона). Сигнал  появляется после начала движения “люльки” с
вагоном к верхним упорам (φ=57÷76º).
появляется после начала движения “люльки” с
вагоном к верхним упорам (φ=57÷76º).
Согласно
алгоритму (1) происходит снижение скорости и дальнейшее вращение происходит при
20%ωзосн, что ведет к сохранению
верхней обвязки вагона. После соприкосновения верхней обвязки вагона с верхними
упорами формируется сигнал  и дальнейшее
опрокидывание вагона идет при повышенной скорости.
и дальнейшее
опрокидывание вагона идет при повышенной скорости.
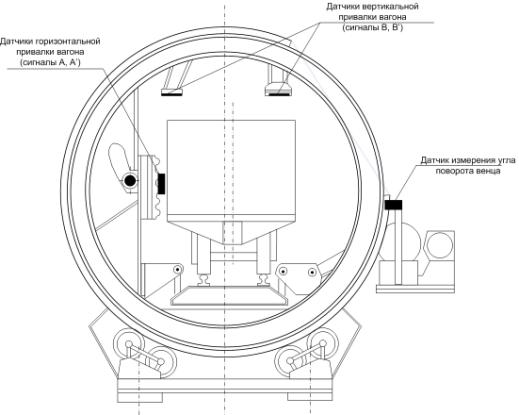
 Рис.2.Схема расположения датчиков положения вагона и
венцов
Рис.2.Схема расположения датчиков положения вагона и
венцов
Применение АВН в
схеме на рис.1 позволяет создать энергосберегающие системы электропривода, снижающие
потребляемую мощность АД, производящие рекуперацию энергии в сеть в тормозных
режимах. САУ АВ позволяет строить системы электропривода с регулируемым cosφ,
что дает возможность включить ее в систему электроснабжения оптимальным образом.
При моделировании электромеханической
системы “электропривод-механизм опрокидывания” получены зависимости активной P и
полной мощности S для системы на базе ПУМ (рис.3,
а). На участках от 20 до 40º и 55 до 175º графики совпадают, что подтверждает работу системы с cosφ=1. На участках, где P имеет
отрицательное значение, система отдает активную энергию в питающую сеть. На
рис.3, б изображены зависимости активной и реактивной мощностей в процессе
опрокидывания системы с АДФР. Из графиков следует, что на протяжении всего
цикла опрокидывания S превышает P, что
свидетельствует о потреблении реактивной энергии из сети системой
электропривода. Зависимости изменения энергии потребляемой из сети для
исследуемых систем представлены на рис. 3, в. По графику можно оценить
потребляемую мощность при опрокидывании. Мощность Ws предлагаемой
системы на 30% меньше мощность системы с АДФР. На графике имеются участки, на
которых Ws имеет
отрицательный наклон, что объясняется отдачей энергии в сеть. Оценку систем
электропривода как потребителей электрической энергии проведем используя график
изменения cosφ для систем двухдвигательного
электропривода (рис.4, а). Для сети система на базе ПУМ c активным
выпрямителем является потребителем активной энергии. В режиме рекуперации cosφ=-1 система электропривода отдает активную энергию в
сеть. Система с АДФР для сети на протяжении цикла опрокидывания имеет cosφ=0,5÷0,7, что отрицательно влияет на сеть, вызывает
дополнительные потери в элементах сети. Коэффициент полезного действия
представлен на рис рис.4, б. Можно заключить, что кпд системы на базе ПУМ превышает
кпд системы на базе АДФР. На графике
отношение электромагнитной мощности к потребляемой из сети достигает значения
1,3, что свидетельствует о режиме рекуперации с отдачей энергии в сеть с кпд 0,77.
Система электропривода на рис.1 показала
свою высокую энергетическую эффективность по сравнению с существующей системой
с АДФР, позволяет поддерживать в сети электроснабжения требуемое значение cosφ, которое можно установить близким к единице, и
обеспечивать понижение энергопотребления в среднем на 20% за цикл опрокидывания.
Литература
1. Козярук А.Е. Современное и
перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов
[Текст] / общ. ред. А.Г. Народицкий. –
СПб., 2001. – 126 с.
2. Теличко Л. Я., Корчагин А. А.
Разработка и исследование оптимальной системы двухдвигательного электропривода
механизма опрокидывания // Вестник Воронежского государственного технического
университета. – 2010. № 2. Т. 6 – С. 21 – 24.
3. Теличко Л. Я., Корчагин А. А.
Разработка и исследование системы двухдвигательного электропривода механизма
кантования стационарных роторных вагоноопрокидывателей // Электротехнические
комплексы и системы управления. – 2011.
№ 1. – С. 23 – 28.
|
|
Рис.3. Зависимости P=f(φp), S=f(φp), Ws=f(φp): а) 1 – активная мощность, потребляемая из сети,
 и 2 – полная
мощность и 2 – полная
мощность  системы
электропривода на базе ПУМ; б) 1 – активная мощность, потребляемая из сети, системы
электропривода на базе ПУМ; б) 1 – активная мощность, потребляемая из сети,
 и 2 – полная
мощность и 2 – полная
мощность  системы
электропривода с АДФР в) 1 – потребляемая из сети энергия системы
электропривода на базе ПУМ и 2 –
системы электропривода с АДФР системы
электропривода с АДФР в) 1 – потребляемая из сети энергия системы
электропривода на базе ПУМ и 2 –
системы электропривода с АДФР
|
|