Технические науки/6. Электротехника и радиоэлектроника
Жунисбеков Б.Ш
Карагандинский
государственный технический
Университет, г.
Караганда, Казахстан
РАЗРАБОТКА МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
ДЛЯ ЛАБОРАТОРНОГО КОМПЛЕКСА ОБЪЕКТОВ УПРАВЛЕНИЯ ЛКУ-5
Лабораторный комплекс ЛКУ-5 представляет собой набор реальных объектов
управления: электродвигателя, потенциометра, тахогенератора, нагревательного
элемент теплового объекта, электролампы оптического объекта. Лабораторная
установка может использоваться для моделирования следующих типов звеньев:
теплового инерционного звена, динамического звена второго порядка, электропривода с двигателем
постоянного тока в режимах позиционирования и управления скоростью. В режиме
позиционирования выходным сигналом ЛКУ-5 является сигнал, снимаемый с
потенциометра подключенного двигателю. В этом режиме двигатель имеет
ограниченное число оборотов вращения в каждую сторону, это связанно с
ограничением движения накладываемым потенциометром. В режиме управления
скоростью выходным сигналом является сигнал, снимаемый с тахогенератора,
подключенного к двигателю. В режиме теплового инерционного звена, входной
сигнал подается на лампу накаливания, с которой передается на фотодиод, откуда
попадает на выход ЛКУ-5. Засветку фотодиода можно изменять, используя регулятор засветки,
поднимающий и опускающий шторку перед фотодиодом.
Работа в качестве модели теплового инерционного звена. Лампа ELI загорается при поступлении сигнала на вход ЛКУ. Засветку фотодиода можно изменять, используя регулятор засветки, поднимающий и опускающий шторку перед фотодиодом. Вращая ручку компенсатора, можно скомпенсировать начальный или темновой фототок засветки (в соответствии с заданием на лабораторную работу). Модель теплового инерционного звена (квадратик ТМ) реализована электрически. Режимы работы лабораторного комплекса ЛКУ-5 отображены на таблице 1.
Таблица 1
|
Режим работы |
Положение органов управления |
|||||
|
SA1 |
SA2 |
Компенсатор |
Регулятор засветки |
Регулятор усилия |
Фиксатор |
|
|
Тепловое инерционное
звено. |
1 |
1 |
+ |
+ |
X |
X |
|
Модель динамического звена
второго порядка. |
0 |
1 |
X |
X |
X |
X |
|
Электропривод
с двигателем постоянного тока: |
||||||
|
- режим позиционирования |
0 |
0 |
X |
X |
+ |
+ |
|
- режим управления
скоростью |
1 |
0 |
X |
X |
+ |
- |
Примечание: “х” -
не используется“+” - используется; 1
- верхнее положение;
“-” - выключен;0 - нижнее положение.
В соответствии с требованиями к составу микропроцессорной системы, была
разработана структурная схема МСЛКУ-5. На рисунке 1 изображена разработанная
структурная схема МСЛКУ-5.

Рисунок 1 - Структурная схема МСЛКУ-5
Микропроцессорная система для лабораторной установки ЛКУ-5 состоит из персонального компьютера A1, USB-UART преобразователя A3, цифро-аналогового преобразователя A5, усилителя A7, объектов управления ЛКУ-5 A8, осциллографа A6 и 2х блока питания A2,A4 по 12В. Из персонального
компьютера А1 закодированные коды ЦАП поступают через USB-UART преобразователь A3 в блок
цифро-аналогового преобразователя А5, где декодируются и преобразуются в
выходное напряжение в диапазоне +-5В. Дальше это выходное напряжение
усиливается усилителем А7 до +-20В и подается на вход ЛКУ-5 блок А8. После
этого осциллографом A6 снимается выходной сигнал с ЛКУ-5. Каждый 12 битный код
ЦАП передается последовательно 2 байтами. Первый байт содержит нижний 6 бит
кода, второй верхний 6 бит кода. Для указания номера байта служит 8 бит. Если 8
бит равен 1 значит это первый байт, если 0 значит 2 байт.
В соответствии со
структурной схемой, были созданы принципиальные схемы цифро-аналогового
преобразователя и усилителя. Принципиальная схема цифро-аналогового
преобразователя приведена на рисунке
2.
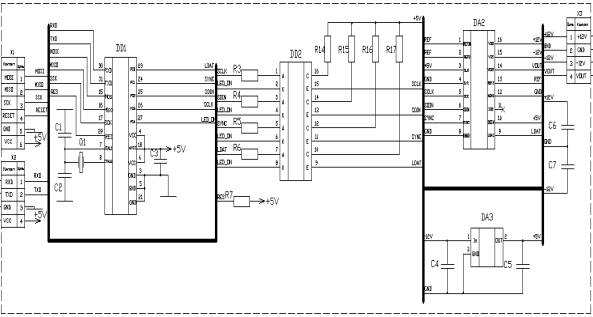
Рисунок 2 – Принципиальная схема цифро-аналогового преобразователя.
Принципиальная схема цифро-аналогового преобразователя состоит из микроконтроллера Atmega8-16PU DD1, подключенного к нему кварцевого резонатора на 16 МГц Q1, оптопарной сборки PC847, стабилизатора напряжения DA3 78L05, и ЦАП DA2 AD7243. Также были подобраны токоограничивающие резисторы в соответствии с требованиями к ЦАП.
Принципиальная схема
усилителя, которая является частью общей схемы микропроцессорной системы
МСЛКУ-5, указана на рисунке 3.

Рисунок 3 – Принципиальная схема усилителя
Принципиальная схема усилителя состоит из микросхемы операционных усилителей BA10358, в которую входят два операционных усилителя и два выходных канала (OUT1,OUT2). Каждый выходной канал состоит из одного операционного усилителя и двух каскадов транзисторов. Каждый каскад имеет равные по модулю коэффициенты усиления, но разные по знаку. Для получения данных коэффициентов усиления служат резисторы R2, R10 и R1, R11.
Было разработано программное обеспечение к МСЛКУ-5. Программа для микроконтроллера была создана на языке Си с помощью компилятора winavr. Программа для персонального компьютера была написана на языке PHP. На рисунке 4 указан интерфейс программного обеспечения для МСЛКУ-5, написанной на языке PHP.

Рисунок 4 – Интерфейс программного обеспечения для
МСЛКУ-5
Данная микропроцессорная система служит для генерации сигналов
подаваемых на ЛКУ-5, а также для снятия сигналов с выхода ЛКУ-5.
МСЛКУ-5 будет использоваться студентами специальности
«Приборостроения», для проведения экспериментов, изучения принципов работы
электродвигателей, тахогенератора, а также различного рода звеньев входящих в
ЛКУ-5.