Технические науки / 12. Автоматизированные системы управления на производстве
Аскерова Л.С., Каверин В.В., Ливинец
А.А.
Карагандинский государственный технический университет,
Республика Казахстан
Линеаризация модели регулируемого
асинхронного электропривода с преобразователем частоты в режиме динамического
торможения
В настоящее время современные
электроприводы главного подъёма мостовых кранов достаточно часто оснащаются
регулируемым асинхронным электроприводом с короткозамкнутым электродвигателем.
При эксплуатации рассматриваемого класса машин можно выделить три основных режима:
пуск электропривода, установившаяся работа в двигательном и генераторном
режимах и торможение. Пуск и установившаяся работа в двигательном режиме
достаточно широко исследованы, для них получены оптимальные законы управления и
реализованы системы управления. Однако генераторные
режимы работы
регулируемого электропривода исследованы
в меньшей степени. Данная работа посвящена исследованию динамических
характеристик неизменяемой части регулируемого электропривода в режиме
динамического торможения.
Среди существующих методов исследования
динамических характеристик наиболее полными и законченными является метод,
когда объект управления описывается линейными дифференциальными уравнениями.
Неизменяемая часть регулируемого
асинхронного электропривода, включающая преобразователь и электродвигатель в
режиме динамического торможения, является существенно нелинейным объектом. Для
линеаризации неизменной части электропривода используется метод эквивалентных
логарифмических амплитудных частотных характеристик (ЭЛАЧХ).
Режим управляемого динамического торможения невозможно реализовать без наличия источника постоянного напряжения на входе автономного инвертора. Источник постоянного напряжения при этом требуется для периодического возбуждения асинхронного электродвигателя и последующего преобразования энергии вращающихся маховых масс электропривода в тепловую энергию, выделяемую на тормозном резисторе.
Схема силовой части электропривода
в режиме аварийного торможения представлена
на рисунке 1.
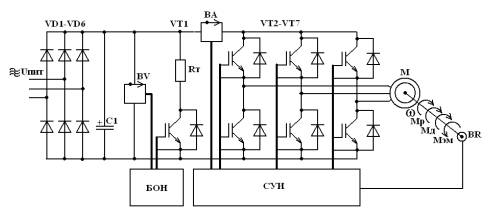
где: VD1-VD6 – неуправляемый выпрямитель на базе силовых полупроводниковых диодов; C1 – фильтр на базе конденсатора большой емкости; RT – тормозной резистор; VT1 – силовой полупроводниковый ключ; VT2-VT7 – трехплечевой автономный инвертор, построенный на базе силовых IGBT-транзисторов; BA – датчик постоянного тока; BV – датчик напряжения на конденсаторе; СУИ – систем управления инвертором; БОН – блок ограничения напряжения; BR – датчик скорости; M – электродвигатель; Uпит – напряжение питающей сети; Mp – раскручивающий момент; Mд – динамический момент; Mэм – электромагнитный момент.
Рисунок 1 – Схема замещения силовой части электропривода
в режиме динамического торможения.
Приведенная на рисунке 1 схема в настоящее
время является наиболее популярной среди регулируемых электроприводов с
асинхронным короткозамкнутым электродвигателем.
Для линеаризации неизменяемой части
электропривода с помощью программы имитационного моделирования MatLab построена схема, представленная на рисунке 2.
А Б

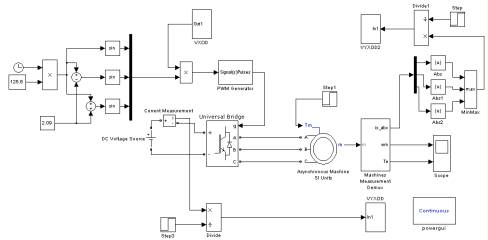
где: А – измерительный комплекс, Б – формирователь частоты трёхфазного напряжения; DC Voltage Source – модель тормозного резистора с полупроводниковым ключом; универсальный мост (Universal Bridge) - модель силовой части инвертора; первая ступенька (Step1) – модель раскручивающего момента; блок Signal(s) Pulses – модель системы управления инвертором; Current Measurement – датчик постоянного тока; VXOD – формирователь гармонических управляющих воздействий; Asynchronous Machine SI Units – модель асинхронного электродвигателя.
Рисунок 2 – Имитационная
модель, неизменяемой части электропривода.
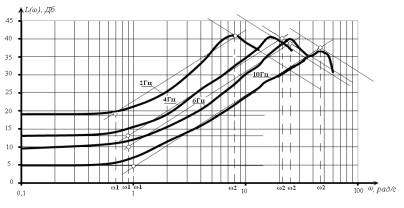
В результате имитационного моделирования
получено семейство ЭЛАЧХ, которое представлено на рисунках 3 и 4.
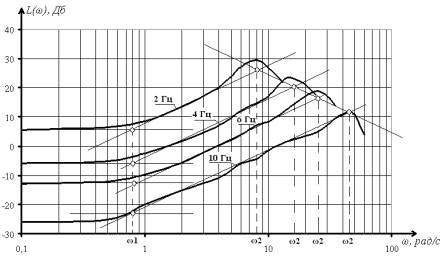
Рисунок 3 – Семейство
ЭЛАЧХ по каналу постоянного тока,
полученное в результате имитационного моделирования для двигателя серии АДЧР280S4, Р=110 кВт.
Рисунок
4 – Семейство ЭЛАЧХ по каналу переменного тока, полученное в результате
имитационного моделирования для двигателя серии АДЧР280S4, Р=110 кВт.
На базе ЭЛАЧХ с использованием табличного
редактора Excel построены асимптоты с
наклоном +20 дб/дек и -20 дб/дек. Значения частот сопряжения асимптот ω1 и ω2 для различных значений частоты и
напряжения статорной обмотки представлены в таблице 1 и 2.
Таблица 1 – Значения частот сопряжения
асимптот ω1 и ω2 для различных значений частоты
двигателя серии АДЧР280S4, Р=110 кВт
при постоянном токе.
|
ω1,
Гц |
T1 |
ω2,
Гц |
T2 |
|
|
2 |
0,8 |
1,25 |
8 |
0,125 |
|
4 |
0,8 |
1,25 |
17 |
0,059 |
|
6 |
0,8 |
1,25 |
26 |
0,039 |
|
10 |
0,8 |
1,25 |
45 |
0,02 |
Таблица 2 – Значения частот сопряжения
асимптот ω1 и ω2
для различных значений частоты серии АДЧР280S4, Р=110 кВт при переменном токе.
|
ω, Гц |
ω1, Гц |
T1 |
ω2, Гц |
T2 |
|
2 |
0,7 |
1,43 |
8 |
0,125 |
|
4 |
0,9 |
1,1 |
21 |
0,048 |
|
6 |
0,9 |
1,1 |
25 |
0,04 |
|
10 |
1 |
1 |
48 |
0,021 |
На основании полученных частот сопряжения
и аппроксимации ЭЛАЧХ асимптотами с наклонами +20дБ/дек и -20дБ/дек определена
линейная передаточная функция неизменной части электропривода по каналом
переменного и постоянного тока, которая имеет вид:
 (1)
(1)
где: T1 и T2 –
значения постоянных времени передаточной функции, численные значения которых
определяются по формулам:
для  и
и  (2)
(2)
Таким образом:
- разработана схема замещения асинхронного
электропривода в режиме управляемого динамического торможения;
- разработана имитационная модель в среде MatLab 7.11.0;
- получены эквивалентные логарифмически
амплитудные характеристики с использованием табличного редактора Excel;
- определена обобщенная передаточная
функция и получены численные значения постоянных времени передаточной функции.
Литература:
1.
Каракулин М.Л.,
Каракулин Е.М., Лапина Л.М. Расширение диапазона регулирование выходного
напряжения импульсного регулятора: Труды Международной конференции. −
Изд-во КарГТУ, 2009, 594с., с.190-192
2.
Эм Г. А. Элементы систем
автоматики: Учеб. пособие. – Караганда: Изд-
во КарГТУ, 2007. – 145с.