К.т.н. Вайс Ю.А., Кыдыралина Л.М.
Восточно-Казахстанский государственный технический
университет,
Семипалатинский государственный университет, Казахстан
ДИНАМИЧЕСКИЕ СВОЙСТВА ДВУХКАНАЛЬНОЙ СИСТЕМЫ
Структурная схема
исследуемой автоматической двухканальной системы представлена на рис. 1.

Рисунок 1 – Структура
автоматической двухканальной системы: Х(р)
– входное (управляющее) воздействие; Z(p) – приведенная к выходу системы нагрузка; Y(p)–выходная (регулируемая0
переменная; К1(р)–
передаточная функция дополнительного канала;K2(p)–передаточная функция
основного канала; β1
– безынерционный делитель (обратная связь), р
– оператор Лапласа.
Система с
такой структурой, названная обобщенной, по своим свойствам адекватна целому
классу систем аддитивной коррекции мультипликативной погрешности по входу.
Доминирующим критерием синтеза систем со структурой (рис.1) является
максимизация глубины обратной связи в заданном диапазоне частот при
максимальном использовании аппаратных затрат с целью повышения точности и быстродействия
систем, а также минимизации частотных, фазовых искажений и чувствительности к
помехам. Другим показателям качества, в частности, переходному процессу,
отводилась второстепенная роль.
Передаточные
функции системы (рис. 1) по управлению
WY/X (p)=![]() (1)
(1)
И нагрузки
WY/X(p)=-![]() (2)
(2)
Считаем, что до момента скачкообразного изменения нагрузки
регулируемая величина имела установившееся значение Y0. Также зададим произвольно значение передаточной функции (1)
в статическом режиме WY/X(0) =
10 и соответствующей настройке цепи отрицательной обратной связи обеспечим в
установившемся режиме до момента приложения скачка нагрузки
Исследование системы с помощью
переходной функции производится по прямым показателям качества, к которым
относятся:
-перерегулирование
{σ = yмакс –yуст)/yуст} – характеризует степень удаления системы от границы
устойчивости, где yмакс – максимальное
значение переходной функции; yуст – установившееся
значение переходной функции; колебательность – допустимое число колебаний переходной функции
относительно установившегося значения; время регулирования (tp) –
время до первого пересечения переходной функцией установившегося значения; длительность переходного процесса (tпп) – промежуток времени, по истечении которого выполняется
неравенство |y(t)-yуст|≤∆,
где ∆ = 0,05 yуст.
Используя преобразование Лапласа
получим следующую систему дифференциальных уравнений первого порядка:
![]()
![]()
![]()
![]() (13)
(13)
![]()
+![]()
На заданной сетке задача Коши решена
численном методом Рунге-Кутта четвертого порядка. Если за верхнюю границу
диапазона рабочих частот каналов условно принять f0 = 1 Гц (ω0
= 2πf0 ≈6, 283 рад/с); статические коэффициенты усиления задать β1К10 = 100, К20=10, тогда переходная
функция системы при условии Y(0)/X(0) = 10 будет иметь
вид затухающего колебания, принимающего устойчивое состояние при h(t) =10 и колеблющегося в диапазоне 5%,
при этом y(t) = h(t).
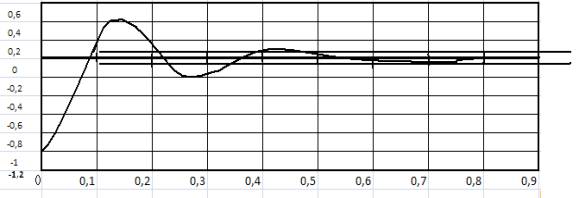
Если рассмотреть режим, когда управляющее воздействие
отсутствует, то есть x(t) = 0, то при прочих
равных условиях переходная функция системы по возмущающему воздействию будет
иметь вид (рис. 2):
![]()
![]()
![]() h(t)
h(t)
t ±5%
Рисунок 2 – Переходная функция системы (рис. 1) при условии:
f0 = 1 Гц, β1К20=100,
К10=10, Y(0)/X(0) = 10, Х0 = 0, { z(t) = 1(t), t ≥ 0}.
Таким образом, результаты исследования позволяют сделать
вывод, что при больших значениях выходной величины в условиях умеренных
колебаний нагрузки вызываемый ими переходный процесс в системе обеспечивает
«мягкий» переход системы из одного режима работы в другой.
Литература:
1.
Парамзин А.П., Рахметулина С.Ж.
Оценка влияния малого параметра на качество переходного процесса одного класса
автоматических систем // Вестник ВКГТУ. – 2008. № 4. – Усть-Каменогорск: ВКГТУ,
2008. – С. 145 -151.
2.
Парамзин А.П., Рахметулина С.Ж.
Исследование влияния нагрузки на динамические свойства двухканальной системы //
Вестник ВКГТУ. – 2009. № 3. – Усть-Каменогорск: ВКГТУ, 2009. – С. 154 -159.