ДИНАМИКА ИНЕРЦИОННОЙ БЕССТУПЕНЧАТОЙ ПЕРЕДАЧИ
С ОДНИМ ВЫХОДНЫМ МЕХАНИЗМОМ СВОБОДНОГО ХОДА
Инерционно-импульсные
передачи [1] обладают компактной конструкцией, высоким коэффициентом полезного
действия, широким диапазоном трансформации момента и имеют ряд других
преимуществ по сравнению с другими типами бесступенчатых передач. Однако,
несмотря на эти преимущества, инерционно-импульсные передачи не находят
широкого применения в автомобильной промышленности. Основная причина заключается в наличии в конструкции таких
передач механизмов свободного хода, отличающихся недостаточной надежностью в
условиях тяжелых режимов работы: больших динамических нагрузок, пульсаций,
высокой частоты включения и выключения.
Общая схема
инерционно-импульсных передач содержит импульсный механизм с неуравновешенными
грузами, например, планетарный механизм с неуравновешенными сателлитами и два
механизма свободного хода, один из которых (выходной) передает крутящий момент
на ведомый вал, другой (корпусной) замыкает обратный импульс момента на корпус
передачи. Наличие двух механизмов свободного определяет возможный путь
повышения надежности ─ сокращение числа механизмов свободного хода. Так,
например, известная передача Хоббса [1] имеет лишь один корпусной механизм
свободного хода. В этой передаче отсутствует выходной механизм свободного хода,
а выходной вал импульсного механизма непосредственно связан с ведомым валом
передачи. Такая конструкция характеризуется высокой неравномерностью вращения
ведомого вала, так как выходной вал импульсного механизма, связанный с ведомым
валом передачи, совершает прерывистое вращение.
В докладе предложена
конструкция инерционно-импульсной передачи без корпусного механизма свободного
хода. Конструктивное решение заключается в том, что выходной вал импульсного
механизма связан с корпусом не с помощью механизма свободного хода, как в общей
схеме, а с помощью упругой связи в окружном направлении. В качестве такой связи
может выступать, например, крутильная пружина или торсионный вал. Схема такой
передачи изображена на рис.1.
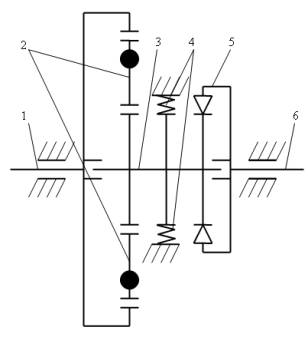
Рис. 1. Кинематическая схема
инерционно-импульсной передачи
Здесь 1 ─ ведущий вал передачи, являющийся
одновременно входным валом импульсного механизма, 2 ─ неуравновешенные
грузовые звенья, 3 ─ выходной вал (реактор) импульсного механизма, 4
─ упругая связь, 5 ─ выходной механизм свободного хода, 6 ─
ведомый вал передачи. Упругая связь изображена схематично и определяет связь
выходного вала импульсного механизма не в радиальном, а в окружном направлении.
Принцип работы
предложенной передачи заключается в следующем.
При вращении ведущего вала
1 неуравновешенные грузовые звенья 2 создают знакопеременные импульсы момента,
действующие на выходной вал 3 импульсного механизма. Так как выходной вал 3
связан с корпусом упругой связью 4, этот вал совершает знакопеременные
колебания, накапливая потенциальную энергию упругого элемента при обратном
направлении движения и отдавая ее вместе с положительным импульсом момента через
выходной механизм свободного хода 5 на ведомый вал 6 при прямом направлении
движения. Такая конструктивная схема передачи позволяет обойтись, как и в
передаче Хоббса, лишь одним механизмом свободного хода, но, в отличие от
передачи Хоббса, обеспечить высокую равномерность движения ведомого вала, так
как выходной вал импульсного механизма не связан непосредственно с ведомым
валом передачи. Передача движения происходит через выходной механизм свободного
хода, поэтому ведомый вал инерционно-импульсной передачи имеет возможность
самостоятельного вращения.
Важно заметить, что замена корпусного
механизма свободного хода на упругую связь не только позволяет сократить число
механизмов свободного хода, лимитирующих надежность передачи, но и снизить
нагрузки на оставшийся выходной механизм свободного хода. Снижение нагрузки
происходит за счет накопления потенциальной энергии в упругой связи при
действии обратного импульса. Рассмотрим, например, режим заторможенного
ведомого вала, являющийся наиболее нагруженным режимом работы передачи. Средние
моменты, действующие на ведомый вал в общей жесткой схеме инерционной передачи и
в передаче с упругой связью вместо корпусного механизма свободного хода, определяются
соответственно выражениями  и
и  , где
, где ![]() и
и ![]() ─ коэффициенты, зависящие от параметров импульсного
механизма. Приравнивая средние моменты, получим
─ коэффициенты, зависящие от параметров импульсного
механизма. Приравнивая средние моменты, получим ![]() . Нетрудно определить, что максимальный момент, действующий
при этом на ведомый вал передачи во втором случае, снижается в
. Нетрудно определить, что максимальный момент, действующий
при этом на ведомый вал передачи во втором случае, снижается в ![]() раз.
раз.
Рассмотренный пример иллюстрируется
графиками, изображенными на рис. 2. Здесь утолщенной линией изображен график
момента, действующего на ведомый вал передачи для общей жесткой схемы, тонкой
линией ─ для предложенной передачи.
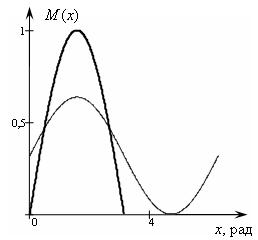
Рис. 2. Графики моментов, действующих на ведомый вал
Более того, в случае установки двух
импульсных механизмов, действующих в противофазе, в предложенной схеме
инерционной передача снижение максимального момента, действующего на
заторможенный ведомый вал, по сравнению с общей жесткой схемой составит ![]() раз. При том на
ведомый вал передачи будет действовать постоянный момент. Аналогичная
возможность по стабилизации момента применительно к импульсным вариаторам
отмечается в статье [2].
раз. При том на
ведомый вал передачи будет действовать постоянный момент. Аналогичная
возможность по стабилизации момента применительно к импульсным вариаторам
отмечается в статье [2].
На основе уравнений Лагранжа второго рода
построим математическую модель рассматриваемой автоматической бесступенчатой
передачи.
Так как передача представляет собой
механическую систему переменной структуры, то можно выделить два участка в
пределах одного цикла работы: 1) участок раздельного движения выходного вала
импульсного механизма и ведомого вала передачи; 2) участок их совместного
движения. На каждом из участков движение передачи описывается системой
нелинейных дифференциальных уравнений. При составлении уравнений учитывалась
динамическая характеристика приводного двигателя [3].
За обобщенные координаты возьмем угол
поворота ![]() ведущего вала 1, угол
поворота
ведущего вала 1, угол
поворота ![]() выходного вала 2
импульсного механизма и угол поворота
выходного вала 2
импульсного механизма и угол поворота ![]() ведомого вала 6.
ведомого вала 6.
На участке раздельного движения выходного
вала импульсного механизма и ведомого вала передачи система дифференциальных
уравнений имеет вид
 (1)
(1)
где
![]() - моменты инерции
ведущего вала, выходного вала импульсного механизма и ведомого вала
соответственно,
- моменты инерции
ведущего вала, выходного вала импульсного механизма и ведомого вала
соответственно,
![]() - суммарный момент
инерции неуравновешенных звеньев относительно геометрического центра,
- суммарный момент
инерции неуравновешенных звеньев относительно геометрического центра,
![]() - суммарная масса
неуравновешенных звеньев,
- суммарная масса
неуравновешенных звеньев,
![]() - расстояние между
геометрическим центром и центром масс неуравновешенного звена,
- расстояние между
геометрическим центром и центром масс неуравновешенного звена,
![]() - параметры импульсного
механизма,
- параметры импульсного
механизма,
![]() - угловая жесткость
упругого элемента,
- угловая жесткость
упругого элемента,
![]() - момент
сопротивления, действующий на ведомый вал передачи,
- момент
сопротивления, действующий на ведомый вал передачи,
![]() - крутящий момент,
действующий на ведущий вал,
- крутящий момент,
действующий на ведущий вал,
![]() - номинальный момент ротора двигателя,
- номинальный момент ротора двигателя,
![]() - угловые скорости
соответственно идеального холостого хода и номинальная,
- угловые скорости
соответственно идеального холостого хода и номинальная,
![]() - электромагнитная
постоянная времени двигателя,
- электромагнитная
постоянная времени двигателя,
![]() - коэффициент
крутизны статической характеристики.
- коэффициент
крутизны статической характеристики.
На участке совместного движения выходного
вала импульсного механизма и ведомого вала передачи система дифференциальных
уравнений имеет вид
 (2)
(2)
Воспользовавшись допущением о постоянстве
угловой скорости ведущего вала ![]() [4], можно значительно
упростить математическую модель передачи, понизив порядок систем
дифференциальных уравнений (1) и (2), которые соответственно примут вид (3) и (4)
[4], можно значительно
упростить математическую модель передачи, понизив порядок систем
дифференциальных уравнений (1) и (2), которые соответственно примут вид (3) и (4)
 (3)
(3)
 (4)
(4)
С помощью функции Хевисайда ![]()
![]() можно свести системы (3) и (4) к одной системе
можно свести системы (3) и (4) к одной системе
 (5)
(5)
Рассматриваемая передача представляет
собой механическую систему переменной структуры. Исследование динамики таких
систем, как правило, затруднительно, так как предполагает рассмотрение участков
постоянства структуры по отдельности, с дальнейшим «сшиванием» участков. Запись
же математической модели передачи в виде одной системы дифференциальных
уравнений (5) позволяет при исследовании движения передачи не заботиться об
отслеживании перехода движения от участка к участку, а ограничиться лишь
заданием начальных условий. При этом процедура исследования динамики передачи
значительно упрощается. Кроме того, разрывная функция Хевисайда допускает
аппроксимацию аналитическими функциями. При этом математическая модель передачи
в виде одной системы (5) может способствовать построению периодических решений
и исследованию их устойчивости на основе аналитических методов.
Численное решение системы (5) методом
Рунге─Кутта было построено с помощью компьютерной программы MathCAD. Параметры передачи при этом принимались следующими:

Графики зависимостей угловых скоростей
выходного вала импульсного механизма ![]() (тонкая линия) и
ведомого вала
(тонкая линия) и
ведомого вала ![]() (утолщенная линия) от
времени изображены на рис.3. Как видим, с начала движения достаточно быстро
ведомый вал передачи выходит на установившийся режим движения с незначительной
неравномерностью вращения, что полностью подтверждает преимущество предложенной
передачи по отношению к передаче Хоббса.
(утолщенная линия) от
времени изображены на рис.3. Как видим, с начала движения достаточно быстро
ведомый вал передачи выходит на установившийся режим движения с незначительной
неравномерностью вращения, что полностью подтверждает преимущество предложенной
передачи по отношению к передаче Хоббса.
В конструкции бесступенчатой механической
импульсной передачи, изображенной на рис..1, упругое звено 4 постоянно связано
с корпусом и промежуточным валом 3, позволяя промежуточному валу совершать
колебания и работать на режиме трансформации момента, но, при этом, препятствуя
промежуточному валу совершать одностороннее вращение на режиме прямой передачи.
Режим прямой передачи характеризуется односторонним вращением промежуточного
вала в прямом направлении.
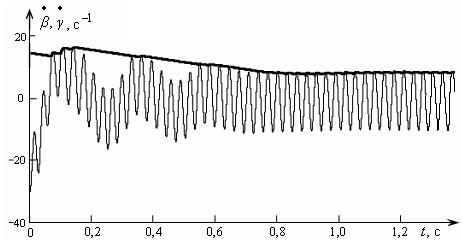
Рис.3. Зависимости углов поворота выходного вала
импульсного
механизма и ведомого вала передачи от времени
Для обеспечения работы передачи не только
на режиме трансформации момента, но и на режиме прямой передачи, упругое звено
4 может быть снабжено элементом отключения 7 промежуточного вала 3 от корпуса
(рис. 4) или корпуса от промежуточного вала 3 (рис.5). Элемент отключения 8
может быть выполнен, например, в виде тормоза или муфты.
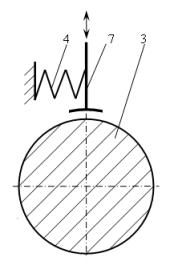
Рис. 4. Схема отключения промежуточного вала от
корпуса
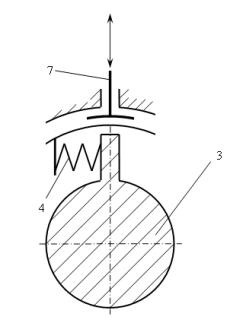
Рис. 5. Схема отключения корпуса от промежуточного
вала
При этом на режиме трансформации момента
промежуточный вал через упругое звено связан в окружном направлении с корпусом,
работая, как было описано ранее, а на режиме прямой передачи промежуточный вал
отключается с помощью тормоза или муфты от корпуса, имея при этом возможность
вместе с ведомым валом вращаться в одном направлении.
Литература
1. Леонов А.И. Инерционные автоматические
трансформаторы вращающего момента. М.: Машиностроение, 1978. 224 с.
2. Благонравов А.А., Ревняков Е.Н. Механическая
бесступенчатая передача импульсного типа // Автомобильная промышленность, 2007.
№5. С. 11 ─ 14.
3. Вейц В.А. Динамика машинных агрегатов. Л.:
Машиностроение, 1969. 370 с
4. Полецкий А.Т., Васин Г.Г. К интегрированию
уравнений инерционного трансформатора момента. В кн.: Динамика машин. М.:
Машиностроение, 1969. C. 64 – 69.