Бугаєнко О. С.
Національний технічний
університет України «Київський Політехнічний Інститут»
Система
управління хімічним реактором по переробці радіоактивного натрію рідкофазним
способом
Нині широко
використовується радіоактивний натрій – в промисловості, в сільськогосподарчій
діяльності. Виникає потреба переробки радіоактивного натрію. На сьогодні існує
твердофазний, газофазний та рідкофазний способи переробки натрію.
Найбільш поширеним є
рідкофазний спосіб, під час якого радіоактивний натрій перетворюється на
концентрований розчин лугу – гідроксид натрію. Саме цей спосіб був розроблений для переробки теплоносія
реактора EBR-II. Цей спосіб дає змогу отримати кінцевий продукт переробки з
мінімальним збільшенням об’єму у порівнянні з вихідним об’ємом натрієвого
теплоносія, а також максимально компенсувати теплоту реакції за рахунок тепла
випарювання вологи з поверхні киплячого розчину.
Принцип роботи установки
з переробки натрію полягає у здійсненні реакції натрію з водою в
концентрованому розчині гідроксиду в хімічному реакторі. Для отримання розчину
заданої концентрації системі управління необхідно здійснювати подачу натрію і
води в строго визначених кількостях.
Тобто, для підтримки безперервного процесу переробки, системі управління
необхідно забезпечити регулювання концентрації та маси лужного розчину в
ємності реактора. Конструктивні особливості технологічного обладнання установки
з переробки натрію накладають певні обмеження на контур управління
концентрацією. Зокрема, основною вимогою до системи управління є забезпечення
безперервного, стабілізованого потоку натрію, у зв'язку з чим, регулювати
концентрацію розчину лугу в хімічному реакторі можна тільки за рахунок вхідного
потоку води. Маса лужного розчину в ємності реактора регулюється за рахунок відведення
надлишків лугу на ділянку розбавлення, при цьому необхідно підтримувати робочий
рівень заповнення ємності.
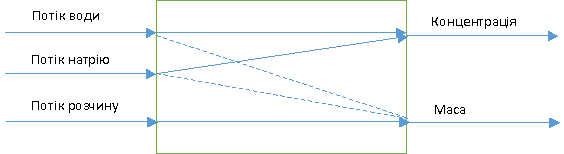
Таким
чином, функціональна схема об'єкта автоматизації буде містити три
матеріально-енергетичних потоку, а саме: потік води, потік натрію і потік
розчину, що відводиться з реактора (Рис. 1).
Рис.
1 Функціональна схема об’єкта автоматизації
Отже, хімічний реактор є
складним багатозв'язним об'єктом з трьома вхідними і двома вихідними змінними,
при цьому зміна потоків натрію і води призводить до зміни концентрації розчину,
а зміна потоку розчину впливає на його масу. Існує залежність маси розчину від
вхідних потоків води і натрію, але регулюючої змінної для маси є потік розчину.
Таким чином
технологічний об’єкт управління можна описати двома передаточними функціями:
-
передаточна
функція по каналу «потік води – концентрація розчину»;
-
передаточна
функція по каналу «потік розчину – маса розчину».
Передаточна функція по каналу «потік води
– концентрація розчину» має наступний вигляд
![]()
де GH2O – потік води, GSteam – пароутворення,
Wg – передаточна
функція по керуванню (при відсутності збурень); Wf – передаточна
функція обєкта по каналу збурення (при відсутності задаючого впливу).
Передаточна функція по каналу «потік
розчину – маса розчину» :
![]() де GSol – потік розчину.
де GSol – потік розчину.
Знаходження передаточної
функції об’єкта управлінння по каналу «потік розчину - маса розчину»
виконується за умови знаходження хімічного реактора в стаціонарному стані. Оскільки
в стаціонарному режимі всі потоки, крім потоку розчину, постійні і в сумі дають
константу С, то в цьому випадку збурення відоме, постійне і дорівнює С.
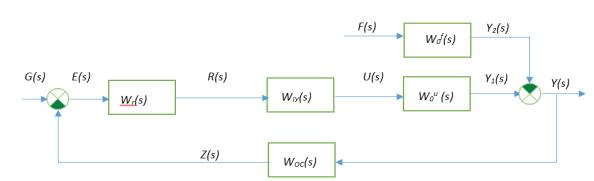
Враховуючи,
що об'єкт описується двома передаточними функціями (по управлінню та збуренню),
структурну схему системи автоматичного регулювання можна представити, як
показано на Рис. 2:
Рис. 2 Структурна схема системи автоматичного
регулювання концентрації лугу
Вважаємо, що система
повинна відповідати таким вимогам:
• запас стійкості по
фазі jm = 45°;
• час встановлення 5
хвилин.
Зважаючи на необхідність
компенсації САР збурюючого впливу, закон управління повинен дозволяти
компенсувати статичну помилку, отже, регулятор повинен бути астатичним. За
допомогою критерію Рауса-Гурвіца проведено аналіз стійкості системи при використанні
в регуляторі ПІ, ПД і ПІД законів управління.
Таблиця Рауса отримана з
характеристичного полінома система автоматичного регулювання з ПІ-регулятором,
містить зміну знаку в першому стовпці, отже, система управління з таким
регулятором буде нестійка.
Якщо використовувати
ПД-регулятор система автоматичного регулювання може бути стійкою, тому що ні
один коефіцієнт характеристичного полінома не дорівнює нулю, але не буде
володіти астатизмом щодо збурюючого впливу.
![]()
Регулювання
за допомогою ПІД-регулятора задовольняє критерії керування. Передаточна функція
системи автоматичного регулювання з ПІД-регулятором:
Коефіцієнти регулювання: задамо KІ=0.05 отримаємо КП
=8.601, КД=3.227*10-3
Література:
1. Tazhibayeva I.,
Herrick A. Sodium Coolant Handling Project of BN-350 Fast Breeder Reactor. –
Almaty: Glory Ltd., 2010. – 304 p.
2. Garcia H.E.
Modeling and Control of a Sodium Conversion Process Applied to Nuclear
Decommissioning Activities // Nuclear Technology. – 1998. – V. 123. – № 8. – P.
54–60.
3. Daubert T.E.
Chemistry WebBook // NIST Standard Reference Database Number 69. 2004. URL:
http://webbook.nist.gov/chemistry.
4.
Ч.
Филлипс, Р. Харбор. Системы управления с обратной связью. – М., Лаборатория
базовых знаний, 2001.