Технические науки/3.
Отраслевое машиностроение
Дудников В.С.
Днепропетровский
национальный университет, Украина
Анализ возможных и реализованных
кинематических и конструктивно-компоновочных схем электромеханических устройств
поворота лопастей ветроколес с горизонтальной осью вращения
Известно,
что наибольшее распространение в современных ветроэнергетических установках
(ВЭУ) получила схема регулирования путем поворота лопастей ветроколес с
использованием как гидравлических, так и механических (электромеханических)
приводов.
В состав гидравлического привода входят гидроцилиндры
поступательного движения, приводимые в действие маслонасосными станциями
высокого давления. Гидравлические исполнительные механизмы сравнительно простые
в конструктивном отношении, но имеют повышенные габариты и вес, требуют
дополнительный источник внешней энергии, периодических регламентных работ по
устранению утечек масла, при повреждении гидроцилиндров и питающих их
магистралей возможны локальные разрушения прилегающих элементов конструкции.
Электромеханические регуляторы сложнее по конструкции, но
более компактные, хорошо управляются, наиболее безопасные для остальной части
конструкции ВЭУ при их повреждении. Электрический привод обычно монтируется с
передаточными исполнительными механизмами в единый блок, с единым корпусом и
общими связями, что еще в большей степени приводит к сокращению габаритов и
веса.
Гидравлические регуляторы требуют постоянной работы насоса
и, как следствие, непроизводительных затрат электроэнергии на обслуживание
самой ВЭУ. Электромеханические регуляторы, как правило, тратят электроэнергию
только в моменты регулирования лопастей ветроколеса.
Опыт эксплуатации экспериментальных образцов ВЭУ-250С,
разработанных конструкторским бюро «Южное», с гидравлическими регуляторами
показал их малую долговечность и надежность, особенно частыми были разрывы
шлангов высокого давления, разливы масла. Частые переключения золотников для
реверса гидроцилиндров при больших нагрузках иногда приводили к резонансу с
конструкцией башни ВЭУ, в результате чего было предложено уменьшить скорость
срабатывания регуляторов с 70 мм / с до 30 мм / с, а затем вообще отказаться от
гидравлических регуляторов, заменив их электромеханическими.
Нами впервые в Украине были предложены и разработаны
электромеханические устройства поворота лопастей для ВЭУ различной мощности. В
конструкциях использованы готовые комплектующие, изготавливаемые отечественной
промышленностью (шариковые винтовые передачи, асинхронные электродвигатели,
планетарные редукторы, электромагнитные тормоза).
Рассмотрим некоторые из разработанных устройств. Для замены
гидравлических регуляторов поворота лопастей ветроколеса ВЭУ-250С предложен
электромеханический регулятор, состоящий из двух идентичных преобразователей
вращательного движения в поступательное и системы управления ими. Оба
преобразователи соединены между собой кронштейном, образуя жесткую ферму,
которая замыкает на себе реактивные моменты, действующие на корпуса. Система
управления, используя показания фотоэлектрических датчиков положения и
скоростей, позволяет синхронизировать работу двух преобразователей.
Каждый преобразователь включает асинхронный
электродвигатель, двухступенчатый цилиндрический зубчатый редуктор, шариковую
винтовую передачу, систему из двух герконовых конечных выключателей, которые
отключают питание электродвигателя при достижении штоком, который перемещается
поступательно, своих двух, предельных положений. На входном валу редуктора
жестко закреплен фрикционный диск нормально замкнутого электромагнитного
тормоза и чувствительный элемент фотоэлектрического датчика перемещений. Внутри
корпуса преобразователя установлен резинометалический демпфер, позволяющий
смягчить удары штока по подшипникам винта шариковой винтовой передачи при его
аварийном втягивании под действием усилия возвратной пружины и аэродинамической
нагрузки со стороны лопастей ветроколеса.
Система управления, управляя работой двух тормозов и
электродвигателей, исключает перекос усилий, создаваемых двумя
преобразователями, при передаче их на механизм поворота лопастей ветроколеса.
Для увеличения угла поворота лопастей включается электродвигатель. Уменьшение
же угла происходит под действием усилия возвратной пружины и аэродинамической
нагрузки на лопастях ветроколеса, при этом двигатель работает в
подтормаживающем режиме при включенном тормозе. После электрического отключения
тормоза он удерживает шток преобразователя в любом промежуточном положении без
подвода энергии. Отключение тормоза происходит в моменты нулевой частоты
вращения (моменты смены направления вращения) ротора двигателя по показаниям
фотоэлектрического датчика перемещений, являющегося одновременно датчиком
скорости. При аварийном отключении питания двигателя регулятор автоматически
осуществляет перевод ветроколеса в флюгерный режим, для чего осуществляется
циклическое включение-отключение тормоза по командам от блока управления,
который при этом переходит на питание от аккумулятора 24В.
В отличие от регулятора ВЭУ-250С регулятор для ВЭУ-500
выполнен моноблочным и соосным. Он частично располагается внутри пустотелого
вала зубчатого мультипликатора и, с одной стороны, через подшипниковую
разделительную муфту соединен с вращающейся штангой, управляющий через рычаги
поворотом лопастей ветроколеса, а, с другой стороны, за пределами
мультипликатора, имеет шарнирно-карданное соединение с корпусом головки ВЭУ.
Вращение от асинхронного электродвигателя через
двухступенчатый планетарный редуктор передается на винт шариковой передачи, с
помощью которой превращается в поступательное перемещение выходного штока,
передается через подшипниковую разделительную муфту управляющей штанге, которая
вращается вместе с ветроколесом и поворачивает лопасти ветроколеса.
Регулятор снабжен фотоэлектрическими датчиками конечных
положений, которые подают команды на отключение питания и остановку
электродвигателя. После срабатывания концевых выключателей возможен только
реверс электродвигателя.
Кроме того, регулятор оснащен фотоэлектрическим датчиком
перемещений, представляющим собой реверсивный счетчик импульсов и позволяющим
судить о текущем положении выходного штока регулятора. На одном валу с датчиком
перемещений установлен электромагнитный безлюфтовый нормально закрытый
фрикционный тормоз, который при отсутствии электропитания синхронизируется с
отключением электродвигателя и
позволяет удерживать лопасти ветроколеса в любом положении, определяемом
скоростью набегающего потока. По команде от системы управления ВЭУ подается
электропитание на тормоз и электродвигатель, что приводит к соответствующему
изменению положения лопастей, которое соответствует новому значению скорости
набегающего воздушного потока. Для удобства эксплуатации регулятор снабжен
ручным дублером привода.
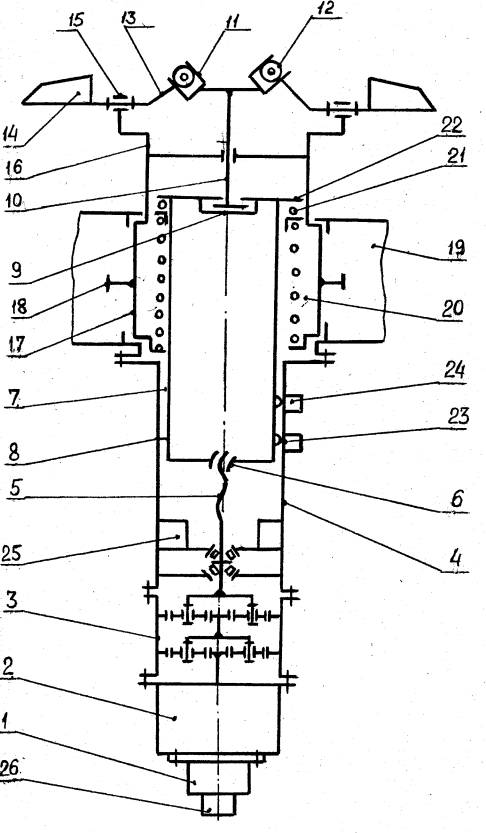
Принципиальная кинематическая схема регулятора и его
взаимодействия с лопастями ветроколеса представлена на рисунке 1. Регулятор
содержит электромагнитный тормоз 1, который фланцем крепится к корпусу
двигателя 2, тормозя при этом в обесточенном состоянии его вал (используется
электродвигатель с двумя выходными концами). Двигатель 2 фланцем присоединяется
к корпусу двухступенчатого планетарного зубчатого редуктора 3, который освоим
вторым фланцем соединяется с корпусом 4 преобразователя, в котором вращательное
движение винта 5 шариковой винтовой передачи с помощью шариковой гайки 6, закрепленной
на одном конце полого штока 7, превращается в поступательное движение штока 7
относительно корпуса 4 по направляющей шпонке 8. Второй конец штока 7 через
подшипник 9 (подшипниковую разделительную муфту) соединен с управляющей штангой
10, которая своими наклонными пазами 11 взаимодействует с роликами 12,
установленными на рычагах 13 лопастей 14 ветроколеса, которые вращаются в
подшипниках 15 вала 16 ветроколеса, переходящего в вал 17 ведущего зубчатого
колеса 18 мультипликатора 19. Внутри вала 17 установлена пружина сжатия 20,
которая одним своим торцом опирается на торец вала 17, а вторым торцом через
подшипник 21 на выступ 22 штока 7. На штоке 7 выполнены выступы 23, от которых
срабатывают концевые выключатели 24. Внутри преобразователя установлен резинометалический
демпфер 25.
Регулятор работает так. При подаче напряжения на тормоз 1
освобождается вал двигателя 2. После этого подается питание на электродвигатель
2, вращение которого через редуктор 3 передается на винт 5. Вращения винта 5 с
помощью шариковой винтовой передачи превращается в поступательное движение
штока 7. Шток втягивается в корпус 4 преобразователя. Вместе со штоком 7
перемещается управляющая штанга 10. Пазы 11 при поступательном перемещении
штанги 10 давят на ролики 12 и через рычаги 13 поворачивают в подшипниках 15
лопасти 14 ветроколеса. Вместе со штоком 7 перемещается выступ 22, который
через подшипник 21 сжимает пружину 20, вращающуюся вместе с валом 17
мультипликатора 19 и валом 16 ветроколеса.
Выталкивания штока 7 при необходимости осуществляется
усилием сжатой возвратной пружины 20 и аэродинамической нагрузки на лопастях 14
ветроколеса при отключенном двигателе 2 и включенном тормозе 1. Для
использования регулятора как позиционного поводу он снабжен фотоэлектрическим
датчиком перемещений 26.
Для разработчиков новых ВЭУ определенный интерес
представляет устройство и, в частности, принцип регулирования ВЭУ USW 56-100,
которая является представителем второго поколения ВЭУ.
Для
обеспечения автоматического ориентирования по ветру ветроколесо находится за
головкой, вращающейся относительно фермы. В головке, располагаются основной
вал, зубчатый двухступенчатый мультипликатор, электрический генератор,
устройство управления поворотом лопастей и другие вспомогательные обслуживающие
системы. Основной вал на двух подшипниках установлен в кронштейне корпуса
головки. С одной стороны к основному вала с помощью фланцевого соединения
подвешена ступица ветроколеса, в которой с возможностью вращения установлены
три лопасти. С другой стороны также с помощью фланцевого соединения подвешен
мультипликатор, корпус которого от вращения под действием реактивного крутящего
момента удерживается относительно корпуса головки с помощью тяги со
сферическими шарнирами на концах. Выходной (быстроходный) вал мультипликатора с
помощью двух мембранных муфт и телескопической шлицевой муфты, установленной
между ними, соединен с генератором. На валах лопастей закреплены коромысла
(рычаги), которые посредством шатунов, имеющих на концах сферические шарниры, и
объединяющей их пластины, присоединены к валу управления. Вал управления имеет
подвижное шлицевое соединения с основным валом, перемещаясь по нему под
действием устройства управления поворотом лопастей.
Устройство управления поворотом лопастей (привод Питча)
содержит асинхронный электродвигатель, червячный редуктор, многодисковый
фрикционный электромагнитный тормоз, выполненный по схеме «нормально закрытый»,
однодисковую фрикционную электромагнитную сцепной муфту, выполненную по схеме
«нормально открытый», потенциометрический датчик линейных перемещений вала
управления (угла положения лопастей ветроколеса). Устройство управления
поворотом лопастей смонтировано в виде отдельного узла, которое закрепляется на
корпусе мультипликатора соосно основном валу, при этом его выходной вал с
помощью эвольвентных шлицев соединяется с гайкой передачи винт-гайка трения
скольжения, взаимодействующей с винтом, выполненным на конце вала управления.
Гайка смонтирована внутри основного вала на двух радиальных и двух упорных
подшипниках, причем с помощью фрикционной сцепной муфты она может свободно
вращаться относительно основного вала (муфта отключена) или, наоборот, быть
жестко соединенной с ним (муфта включена).
Регулировка
лопастей осуществляется следующим образом. Тормоз находится в постоянно
включенном состоянии, при включении электродвигателя в ту или иную сторону его
вращения в зависимости от направления изменения (уменьшение или увеличение)
угла положения лопастей и отключенной сцепной муфте происходит принудительное
вращение гайки, которое складываясь с вращением винта, приводит к осевых
перемещений этого винта по вала и соответствующим изменениям угла положения лопастей.
При достижении лопастями расчетного значения угла отключается электродвигатель
и включается сцепная муфта, соединяющая воедино между собой гайку, основной вал
и выходной вал редуктора устройства управления поворотом лопастей. В результате
винт и гайка вращаются с одинаковыми угловыми скоростями и в одном направлении
(каждый из них жестко соединен с основным валом в окружном направлении), а
поэтому отсутствует осевое перемещение управляющего вала; лопасти сохраняют
свое угловое положение, которое фиксируется датчиком линейного
Рисунок
1 - Принципиальная
кинематическая схема регулятора
перемещения, соединенным
с винтом с помощью валика, который проходит внутри выходного вала редуктора.
В аварийной
ситуации отключается тормоз, который при этом удерживает от вращения выходной
вал редуктора и связанную с ним гайку. Вследствие того, что винт соединен с
ветроколесом, которое вращается по инерции он выдвигается из гайки, постепенно
уменьшая угол установки лопастей до флюгерного положения. В момент достижения
флюгерного положения под действием вала управления происходит механическое
размыкание тормоза, который освобождает гайку, давая ей возможность вращаться
вместе с винтом, тем самым, прекращая осевое перемещение вала управления. Через
некоторое время происходит остановка ветроколеса.
Согласно
паспортным данным штатный американский электродвигатель имеет мощность
470 Вт при частоте вращения 1425 об/мин, что при передаточном
отношении червячного редуктора равном 10 обеспечивает вращение гайки с
абсолютной частотой 142,5 об/мин и частотой 70,5 об/мин по
взаимодействующего с ним винта, вращающегося с частотой вращения ветроколеса
72 об/мин. Это приводит к осевым перемещениям винта, а вместе с ним и вала
управления со скоростью 3,73 мм/с в режиме увеличения угла установки
лопастей, т.е. в режиме увеличения мощности ВЭУ. В режиме уменьшения мощности
ВЭУ гайка вращается в противоположную сторону, а поэтому относительная скорость
вращения гайки и винта уже составит 214,5 об/мин, что соответствует
скорости линейного перемещения вала управления 11,35 мм/с. В режиме
запуска ВЭУ эта скорость составляет 7,54 мм/с.
Для
исключения аварийных ситуаций, связанных с потерей управления
электродвигателем, нужно, чтобы момент, создаваемый тормозом, гарантировано
превосходил максимальный крутящий момент, развиваемый двигателем. Фрикционная
муфта сцепления должна развивать момент, который обеспечивает торможение ротора
электродвигателя и лопастей ветроколеса в заданный промежуток времени, что
определяет допустимую погрешность углового позиционирования лопастей и величину
инерционных нагрузок.
Выше были
рассмотрены схемы устройств с поступательным перемещением исполнительного
штока, что с помощью рычагов приводило к соответствующему поворота лопастей
ветроколеса. Этот принцип («тянуть-толкать») заложен в основу большинства
реализованных на практике ВЭУ.
Возможные
варианты конструктивно-компоновочных схем устройств с поступательным
перемещением исполнительного штока представлены на рисунке 2.
В варианте
а) с целью сокращения осевого размера устройства использована параллельная
установка шариковой винтовой передачи 1 с двигателем 2, редуктором 3, тормозом
4, датчиком перемещений 5 и ручным дублером привода 6. Для этого редуктор
должен быть, как правило, собственной разработки с паразитной шестерней, с
помощью которой вращательное движение передается винту шариковой винтовой
передачи. Сокращение осевого габарита обеспечивает также вариант б), однако он
характеризуется большими поперечными габаритными размерами и сложной
конструкцией двухступенчатого коническо-цилиндрического редуктора собственной
разработки.
Вариант в),
напротив, отличается соосным расположением всех составных частей конструкции.
Это обеспечивается использованием планетарного зубчатого редуктора. Возможно
использование серийных планетарных редукторов и мотор-редукторов. На верхней
половине изображен блок концевых выключателей 7, выполненный в виде
двухступенчатого цилиндрического редуктора, который превращает рабочий ход
штока в обороты шторки фотоэлектрического датчика угла поворота лопастей
ветроколеса. Меньшей погрешностью обладает вариант блока концевых выключателей,
изображенный на нижней половине, что исключает необходимость
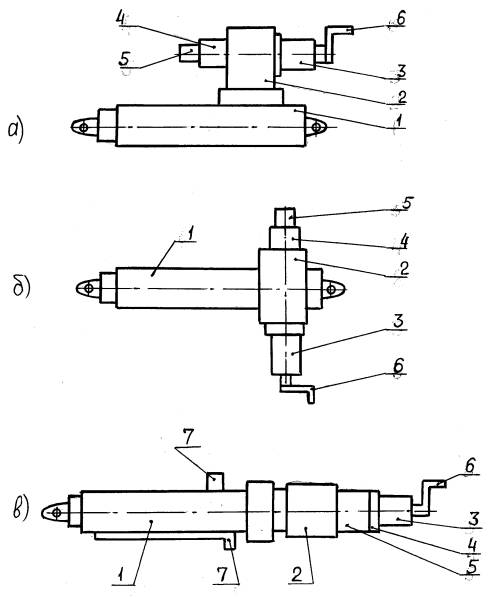
преобразования
поступательного движения во вращательное. Вариант в) реализован на ВЭУ-500.
а)
параллельная установка;
б)
поперечная установка;
в)
соосная установка
Рисунок 2 - Конструктивно-компоновочные схемы