УДК 681.515.8 Технические
науки/10.
Горное дело
Бербець Т.О.(асистент), Пронів М.В.(студентка)
Івано-Франківський національний технічний університет
нафти і газу
Синтез
і моделювання автоматичних систем керування багатомірними об’єктами
нафтогазової промисловості
Неперервні технологічні
процеси великої потужності із складними комплексами енергетичних і матеріальних
потоків і жорсткими вимогами щодо якості продукції, до безпеки персоналу, до
впливу на навколишнє середовище вимагають створення досконалих систем
управління. Зниження на тривалий строк якості продукції і зупинка процесу внаслідок аварії в системах управління або значне забруднення навколишнього
середовища можуть мати
катастрофічні наслідки для
всієї економіки.
Більшість
об’єктів газонафтової і хімічної промисловості є багатомірними об‘єктами. При
синтезі систем керування такими об’єктами значні труднощі пов’язані
з наявністю статичних та динамічних перехресних зв’язків
між різними входами і
виходами систем.
В
якості об’єкта дослідження була вибрана дистиляційна колона, модель динаміки якої
задана передавальною функцією [ 1 ] типу:
![]()
![]()
![]()
![]()
![]() 0 0
0 0
![]() (p)=
(p)= ![]()
![]() 0
0
![]()
![]()
![]() /(
/(![]() p+1)
p+1)
Для такого об’єкта синтезовані
різні системи управління
[2]:
- багатомірна система
автоматичного регулювання з одномірними контурами для управління, які реалізовані за П і ПІ-алгоритмами керування.
Блок-схема такої системи приведена на рис. 1
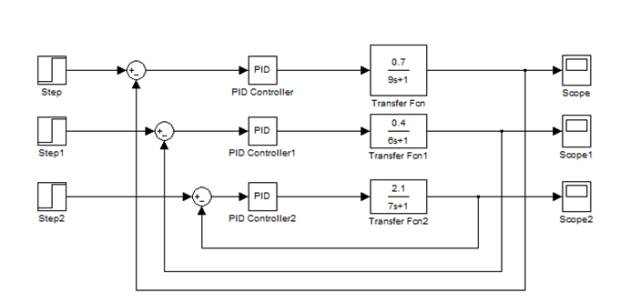
Рис. 1. Імітаційна модель перехідного процесу локальних
систем керування.
- багатомірна система
автоматичного регулювання з одновимірними регуляторами і компенсацією задаючих
впливів (рис.
2)
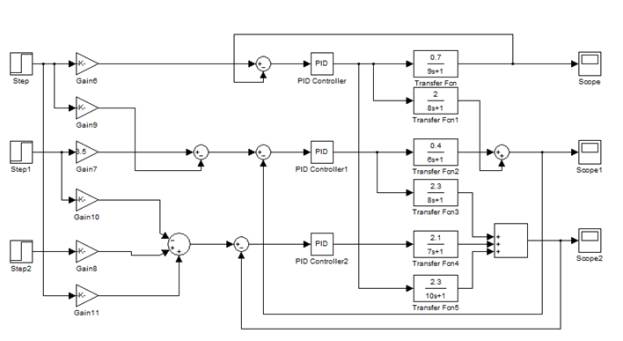 Рис. 2. Імітаційна модель об’єкта з компенсацією
задаючих впливів.
Рис. 2. Імітаційна модель об’єкта з компенсацією
задаючих впливів.
- автономна багатомірна система автоматичного
регулювання
(рис. 3)
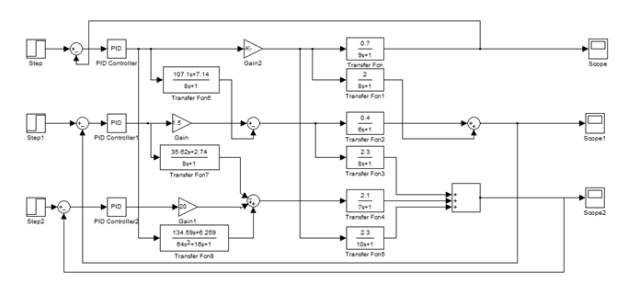
Рис. 3. Імітаційна динамічна автономна система керування
без врахування впливу збурень.
Дослідження виявили наступні недоліки:
-
при реалізації системи управління за першим варіантом маємо коливний характер
перехідного процесу і значні статичні похибки при дії збурень та використанні
П-алгоритма керування; вплив зміни параметрів регулятора по будь-якому одному
із виходів об’єкта на динаміку інших виходів. При використанні ПІ-регуляторі
статична похибка
зменшилась, проте виникли незатухаючі
коливання, обумовлені багатозв’язаністю об’єкта.
- cинтез системи за другим варіантом забезпечив, у порівнянні з першим варіантом, кращі показники перехідного
процесу: процес закінчувався значно швидше і практично без коливань. Проте така
система не забезпечує захист від збурень, оскільки відсутній
головний контур зворотнього зв’язку і вона не являється системою
регулювання по відхиленню.
Досліджена
автономна система керування (із компенсацією перехресних зв’язків) для
статичного і динамічного режимів. Порівняння
перехідних процесів в системі з перехресними зв’язками без компенсаторів
і перехідних процесів в автономній системі керування, дозволяють зробити
висновок, що як статична так і динамічна автономні системи керування реалізують
розв’язок контурів за перехресними каналами, при цьому забезпечують високі показники
якості.
Література:
1. Рей У. Методы
управления технологическими процесами/ У.Рей. - Москва: Мир,
1983, - 368 с.
2.
Семенцов Г.Н. Теорія автоматичного управління спеціалізованими системами: навчальний посібник/
Г.Н. Семенцов, А.І. Лагойда. - Івано-Франківськ,
2012, - 75 с.