СОЗДАНИЕ РЕШАЮЩЕЙ ФУНКЦИИ ПРИ РАСПОЗНАВАНИИ ОБРАЗОВ В
ЭКГ
Кошеков К.Т. Мулдабаев Е.С.
Савостин А.А. Саржанов Н.Н.
Северо-Казахстанский
государственный университет им. М. Козыбаева Республика Казахстан г.
Петропавловск
Конечной целью автоматизированного анализа ЭКС
является классификация данного сигнала с целью отнесения его к одной из
нескольких известных категорий и получение предварительного диагностического
решения, относящегося к состоянию ССС. Необходимо помнить, что ЭКС являются
лишь одним из источников информации для постановки диагноза: классификация
данного сигнала может оказать существенную помощь в диагностике, но почти ни
когда не является единственным фактором.
Создание автоматизированных систем распознавания ЭКС
стало возможным после накопления большого объема клинической информации,
эмпирически показывающей связь отдельных элементов ЭКГ с физиологическими
процессами в миокарде [1]. В результате этого, в процессе анализа сигнала
происходит выявление заданных (в зависимости от характера проводимого
исследования) количественных признаков, на основании которых ЭКС
рассматривается в виде вектора параметров x = (x1, x2, …, xn)T. Так как элементы xi являются
вещественными числами, то вектор x можно рассматривать как точку в n-мерном
пространстве. Поэтому векторы объектов со сходными параметрами будут
формировать кластеры. Для примера на
рисунке 1 показаны двумерные векторы признаков С1 и С2, z1 и z2 –
прототипы этих двух классов, d(x) –
оптимальная линейная решающая функция, представляющая собой перпендикуляр,
проведенный через середину прямой линии, соединяющей прототипы данных двух
классов.
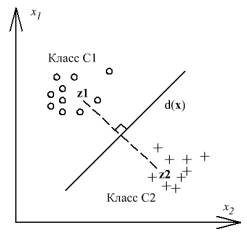
Рисунок 1 – Разделение
двумерных векторов признаков на два класса
Для решения задачи классификации образов необходимо
создание решающих процедур, для отнесения данных к различным классам образов,
основанных на векторах признаков.
Результатом
идентификации элементов ЭКС является формирование комплекса диагностических
признаков, представленных в компактной форме для удобства их обработки на компьютере.
Например,
в работе [2] предлагается следующая интерпретация признаков для зубца P:
-
Ширина интерпретируется
как длительность P, обозначается ΔP и измеряется в секундах (с);
-
Амплитуда обозначается AP
и измеряется в мВ в точке maxP и minP;
-
М-образность
интерпретируется следующей последовательностью: AP
> 0 и nA = 3, где nA – количество экстремумов P;
-
Двухфазность P
записывается следующим образом: nA = 2, AP1 > 0 и AP2 < 0;
-
Остроконечность P с
превышением амплитуды можно интерпретировать как P" > P"max, AP > 0,25, где P" – вторая производная от зубца P по
времени;
-
Инвертирование P
записывается следующим образом: AP < 0
для I, II и AP > 0 в отведении aVR;
-
Чередование зубца P и
комплекса QRS можно представить как ΔPR > 0 (для нормальной
последовательности – P-R) и ΔPR < 0 (для обратной последовательности – R-P);
-
Отсутствие P интерпретируется, очевидно, как AP = 0;
-
Условие nP < nQRS
на ΔT > 10(R-R) обозначает: количество зубцов Р меньше, чем
количество комплексов QRS на
интервале времени большем чем десять интервалов R-R;
-
Условие nP
> nQRS на
ΔT > 10(R-R)
обозначает: количество зубцов Р больше, чем количество комплексов
QRS на интервале времени большем чем десять
интервалов R-R;
Таким образом, для описания всех параметров зубца P, регистрируемого в различных
отведениях, необходимо составить
матрицу p = (pij), где ![]() - количество признаков, а
- количество признаков, а ![]() - количество отведений. Т.е.
- количество отведений. Т.е.
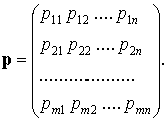 (1.1)
(1.1)
Если
задан некоторый классифицированный набор векторов признаков, то его можно
использовать в роли обучающей выборки [3, 4]. На основании обучающей выборки
возможно разработать математические
функции, которые будут определять разделение между классами. При помощи
этих функций далее осуществляется распознавание новых векторов признаков с
неопределенной классификацией. Набор векторов признаков с известной
классификацией, используемый для оценки разработанного подобным способом
классификатора, называется контрольной
выборкой.
Рассмотрим
метод создания решающей функции для распознавания линейно разделимых образов в
сигнале ЭКС на примере зубца P в одном отведении.
Обобщённая
линейная решающая функция задаётся в форме
d(p)
= a1p1 + a2p2 + … + anpn
+ an+1 = aTp, (1.2)
где p
= (p1, p2, …, pn, 1)T – вектор признаков зубца Р, дополненный добавочным членом, равным единице; a = (a1, a2, …, an, an+1)T – соответственно, дополненный весовой вектор [5].
При
классификации на М классов для
принятия решения необходимо наличие М
весовых векторов и М решающих
функций:
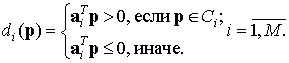 (1.3)
(1.3)
В (1.3)
ai = (ai1, ai2, …, ain, ai,n+1)T –
это весовой вектор для класса Сi.
Если
определить для М классов образов их
прототипы z1, z2, …, zM как
среднее для всех векторов признаков, то евклидово расстояние между произвольным
вектором p и i-м прототипом будет иметь вид:
![]() (1.4)
(1.4)
Тогда
можно сформулировать правило для классификации вектора p в
следующей форме:
![]() (1.5)
(1.5)
Проведем
следующие преобразования
 (1.6)
(1.6)
Максимум
выражения ![]() соответствует минимуму значения D2i, а
последнее, в свою очередь, минимуму Di, так как Di >
0.
соответствует минимуму значения D2i, а
последнее, в свою очередь, минимуму Di, так как Di >
0.
Следовательно,
решающая функция будет определена следующим образом:
![]() (1.7)
(1.7)
Тогда решающее правило может быть
сформировано в виде:
![]() (1.8)
(1.8)
Еще
один способ определения решающего правила основан на утверждении о том, что
вектор p должен быть отнесен к тому классу, который является
ближайшим к данному вектору признаков. Т.е. если задана выборка из N образцов {s1, s2, …, sN}, и каждый образец принадлежит к одному из М классов {C1, C2, …, CM}, то справедливо выражение:
![]() (1.9)
(1.9)
При
данном подходе более надежно определять классификацию на нескольких образцах,
т.е. рассматривать некоторое число r ближайших к классифицируемому образцу соседей. Это
исключит возможность вынесения итогового решения по пограничным образцам [5, 6].
Список
литературы:
1
Микрокомпьютеры в физиологии: Пер с англ./Под ред. П.
Фрейзера. – М.; Мир, 1990. – 383 с.
2
Ивель В. П. Автоматизированные системы измерения и
анализа электрокардиологических сигналов: Монография/ В. П. Ивель, Г. М.
Мутанов. - Алматы: НИЦ "Ғылым", 2002. - 241 c.
3
Загоруйко Н.Г. Методы распознавания и их применение. –
М.: «Советское радио», 1972, – 208 с.
4
Горелик А.Л. и др. Современное состояние проблемы
распознавания/ А.Л. Горелик, И.Б. Гуревич, В.А. Скрипкин. – М.: Радио и связь,
1985. – 160 с.
5
Ту Дж., Гонсалес Р. Принципы распознавания образов/ Пер.
с англ. – М.: Мир, 1978. – 411 с.
6
Дуда Р., Харт П. Распознавание образов и анализ сцен/
Пер. с англ. – М.: Мир, 1976. – 511 с.