Вычужанин В.В.
Одесский национальный морской университет
Математическая модель
помещения судна при периодических нагрузках
Одно из направлений по улучшению показателей микроклимата в помещениях
заключается в использовании современных систем автоматического управления (САУ)
системами кондиционирования воздуха (СКВ).
В САУ модель динамики помещения как
многопараметрического многосвязного объекта может быть реализована в аналоговой
или дискретной форме. Однако при
синтезе аналоговых САУ разработчики сталкиваются с весьма серьезными
ограничениями по
точности и надежности. Иначе обстоит дело с использованием дискретной модели,
предназначенной для разработки цифровой САУ. Гибкость программируемых средств цифровых
САУ существенно расширяет возможности реализации как простых, так и достаточно
сложных дискретных математических моделей.
Динамическая модель помещения при соответствующих
четырех входных и выходных величинах имеет вид
 (1)
(1)
В соответствии с системой
уравнений (1) выходные величины определяются
 (2)
(2)
Рассматривая помещение как многосвязный многопараметрический
объект его дискретную модель можно записать в матричной Z-форме
![]() ,
, ![]() (3)
(3)
где
![]() - матрица – столбец
совокупности входных величин;
- матрица – столбец
совокупности входных величин; ![]() - матрица – столбец выходных величин.
- матрица – столбец выходных величин.
Матричное звено А(Z), входящее в (3), состоит из элементов, каждый из
которых определяется передаточными функциями объекта по каналам его прямых,
перекрестных связей и в общем виде может быть представлено в виде
![]() (4)
(4)
С учетом системы уравнений (1) для
рассматриваемого объекта САУ в матрице
А(Z) элементы ![]() принимают следующие
значения
принимают следующие
значения
 (5)
(5)
Совокупности входных
величин x1…x4 матрицы![]() определяются с учетом возмущающих входных параметров и
соответствующих передаточных функций, воздействующих на объект управления по
формулам
определяются с учетом возмущающих входных параметров и
соответствующих передаточных функций, воздействующих на объект управления по
формулам
 (6)
(6)
Элементы ![]() матричного звена А(Z)
определяются по формулам
матричного звена А(Z)
определяются по формулам
 (7)
(7)
Передаточные функции W(Z) модели объекта это дискретные
передаточные функции апериодических звеньев первого порядка, определяемые по известной
формуле
![]() (8)
(8)
где ![]() =К/Т; а1=-е-аТо; а=1/Т; К, Т-
коэффициент усиления и постоянная времени непрерывной передаточной функции.
=К/Т; а1=-е-аТо; а=1/Т; К, Т-
коэффициент усиления и постоянная времени непрерывной передаточной функции.
Результаты исследований разработанной дискретной модели помещения в MATLAB 6/5 – Simulink приведены на рис.1.
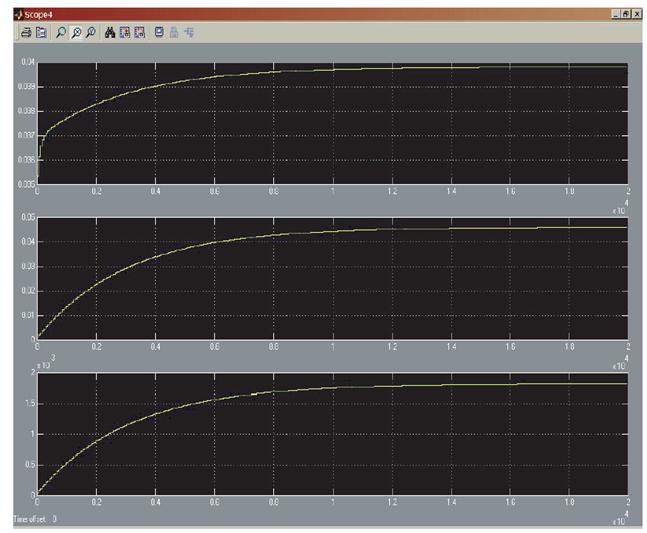
Рис.1 Результаты исследований дискретной модели
помещения в MATLAB 6.5- Simulink.
Полученная дискретная многопараметрическая многосвязная модель кондиционируемого помещения может быть использована для анализа и синтеза цифровой САУ СККВ с различным числом координат. Она легко встраивается в структуру цифровой САУ, реализуемой на основе широко доступной микроконтроллерной элементной базы.