Технические науки/12.
Автоматизированные системы управления на производстве
Андреев Е.В.
Карагандинский
государственный технический университет, Казахстан
Исследование и модернизация двухдвигательного
электропривода мостового крана
На промышленных предприятиях, а также во многих отраслях производства
широко распространенны мостовые краны, выполняющие различные
подъемно-транспортные работы. Возрастающие требования к эксплутационным
показателям крановых механизмов приводят к необходимости применения по
возможности простых и надежных электроприводов, удовлетворяющих
производственным требованиям. Для мостовых кранов, механизма передвижения
тележки, в настоящее время, рационально применение двухдвигательного
асинхронного электропривода, когда исключается сложная кинематическая цепь, в
том числе длинные трансмиссионные валы, связывающие ведущие колеса обеих
сторон. Особенность этих установок заключается
в том, что каждая ходовая тележка, должна иметь собственный регулируемый привод.
При работе мостовых кранов с
большими пролетами возможно проскальзывание приводных колес и заклинивание
реборд колес о головки рельсов. Так как статическая нагрузка на опоры в общем
случае различна, а механические характеристики используемых электродвигателей
механизма не строго идентичны, то вполне вероятны неравномерные нагрузки
электродвигателей и их несогласованное вращение [1].
Одним из возможных решений, для устранения вышеописанных недостатков,
является автоматическое регулирование импульсным способом с использованием
микропроцессорных средств, что позволяет повысить технический уровень систем
управления и упростить эксплуатацию кранового механизма передвижения тележки.
Современный
этап автоматизации характеризуется ростом степени интеграции полупроводниковой
техники и переход от релейно-контакторных средств управления и защиты
электромеханических систем, к средствам силовой электроники – микроконтроллерам
– со встроенным набором специализированных периферийных устройств .
Для повышения
надежности и уровня автоматизации электропривода разработано импульсное
автоматическое управление двухдвигательным асинхронным электроприводом,
функциональная схема которого представлена на рисунке 1.
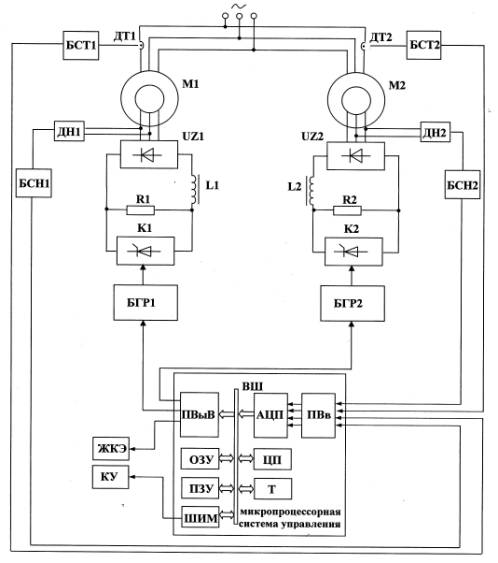
Рисунок 1 - Функциональная схема импульсного
автоматического
управления
двухдвигательным асинхронным электроприводом
Микропроцессорная
система управления выполнена в виде однокристального микроконтроллера,
содержащего порт ввода, аналого-цифровой преобразователь, центральный
процессор, таймер, порт вывода, оперативное запоминающее устройство, постоянное
запоминающее устройство, широтно-импульсный модулятор. Основные узлы и
устройства связывает внутренняя двунаправленная шина данных.
Принцип действия автоматического
импульсного управления двухдвига-тельным асинхронным электроприводом
заключается в том, что в соответствии с полученной информацией, от датчиков
тока статора и датчиков ЭДС, текущие параметры преобразовывают в цифровые коды,
на основе которых вычисляют и формируют импульс, обеспечивающий изменение
скорости, в соответствии с заданным законом регулирования.
Разработанное
импульсное автоматическое управление двухдвигательным асинхронным
электроприводом в цепи роторов, позволяет регулировать скорость системы
электропривода автоматически, вне зависимости от различия их параметров, чем
достигается точность установки, а изменяя время включения тиристорных ключей,
можно регулировать длительность импульса, что позволяет расширить диапазон
регулирования скорости вращения электропривода.
Наряду с
вышеизложенным применение импульсного автоматического управления
двухдвигательным асинхронным электроприводом в цепи роторов позволяет
обеспечить равномерную загрузку электродвигателей системы, что повышает
надежность и уровень автоматизации, а, следовательно, ведет к упрощению обслуживания электрооборудования.
Литература:
1. Лисицын Д.В. Исследование электромеханических процессов в многодвигательных электроприводах одноковшовых экскаваторов// Международная научная конференция: «Наука и образование – ведущий фактор стратегии «Казахстан-2030», 2009г. вып.2.: изд-во КарГТУ, с.373-374.