Технические науки/6. Электротехника и радиоэлектроника
Д.т.н., проф. Цытович
Л.И., к.т.н., доцент Брылина О.Г.,
к.т.н., доцент Дудкин М.М., ведущий инженер Рахматулин
Р.М.
Южно-Уральский
государственный университет, г. Челябинск, Россия
ИНТЕГРИРУЮЩИЕ РАЗВЕРТЫВАЮЩИЕ ДАТЧИКИ
НУЛЕВОГО ТОКА
Высокий уровень помех в каналах передачи
информации систем управления технологическими процессами является одной из
причин сбоев в работе силовой преобразовательной техники [1], в частности,
реверсивных тиристорных преобразователей постоянного тока с раздельным
управлением (ТП). Здесь одним из наиболее чувствительных к внешним помехам
элементом системы управления ТП являются датчики нулевого тока (ДНТ),
построение которых традиционно базируется на том или ином варианте схем
компараторов [2]. При этом уровень фильтрации сигналов помех на входе ДНТ
зачастую ограничивается требованиями к быстродействию системы управления
технологическим объектом.
Одним из эффективных путей повышения
помехоустойчивости систем управления ТП является применение методов
интегрирующего развертывающего преобразования [3-5].
Ниже рассматриваются принципы построения
интегрирующих ДНТ повышенной помехоустойчивости на базе
частотно-широтно-импульсных развертывающих преобразователей (РП) с аналоговым и
цифровым методами обработки выходного сигнала.
Аналоговый датчик нулевого тока
ДНТ [6] (рис.1 а) относится к классу аналоговых
систем с однозонной частотно-широтно-импульсной модуляцией (ЧШИМ). В его состав
входят интегрирующий РП на основе сумматора Σ, интегратора И, релейного
элемента РЭ с неинвертирующей петлей гистерезиса и симметричными относительно
нулевого уровня порогами переключения ±b, а также
пропорциональные звенья КВХ
и КОС на входе и в цепи
обратной связи, определяющие величину коэффициента передачи КП РП со стороны
информационного входа.
Дальнейшее преобразование выходного сигнала РП осуществляется с
помощью дифференцирующего звена Д с постоянными времени Т1, Т2, двухполупериодного выпрямителя
(демодулятора) В, сглаживающего фильтра Ф и порогового элемента ПЭ с порогом
включения D.
В исходном состоянии при входном сигнале,
удовлетворяющем условию |ХВХ|
< (![]() ), РП работает в режиме автоколебаний с ЧШИМ. Здесь:
), РП работает в режиме автоколебаний с ЧШИМ. Здесь: ![]() - амплитуда выходных
импульсов РЭ;
- амплитуда выходных
импульсов РЭ; ![]() - допустимый уровень
сигнала ХВХ,
соответствующий линейному участку характеристики Y0 = f(XВХ), где Y0 – среднее значение выходных импульсов РЭ за
период автоколебаний РП. Период автоколебаний определяется соотношением
- допустимый уровень
сигнала ХВХ,
соответствующий линейному участку характеристики Y0 = f(XВХ), где Y0 – среднее значение выходных импульсов РЭ за
период автоколебаний РП. Период автоколебаний определяется соотношением
 ,
,
где: ![]() – нормированное
значение порогов переключения РЭ;
– нормированное
значение порогов переключения РЭ; ![]() – постоянная времени
интегратора И;
– постоянная времени
интегратора И; ![]() – нормированное
значение входного сигнала ДНТ.
– нормированное
значение входного сигнала ДНТ.
Наличие тока в цепи нагрузки ТП переводит РП в
заторможенный режим, когда выходной сигнал РЭ принимает одно из статических
положений ![]() (рис. 1
б, в). Для этого параметры звеньев
(рис. 1
б, в). Для этого параметры звеньев ![]() подбираются образом,
чтобы входной сигнал XВХ ДНТ (рис.1 б) значительно
превышал бы допустимое значение
подбираются образом,
чтобы входной сигнал XВХ ДНТ (рис.1 б) значительно
превышал бы допустимое значение ![]() . Как правило, для этого необходимо обеспечить КП = 150… 300.
. Как правило, для этого необходимо обеспечить КП = 150… 300.
При срыве в РП автоколебательного режима
выходной сигнал интегратора И достигает зоны
«насыщения» ![]() операционного
усилителя (ОУ) (рис. 1 в), на основе которого реализуется
канал интегрирования РП. Знак координаты
операционного
усилителя (ОУ) (рис. 1 в), на основе которого реализуется
канал интегрирования РП. Знак координаты ![]() противоположен знаку XВХ (рис. 1 б, в).
противоположен знаку XВХ (рис. 1 б, в).
По мере снижения тока нагрузки (рис. 1 б) ДНТ
стремится перейти в режим автоколебаний, что происходит, когда входной сигнал
становится меньше величины ![]() (рис. 1 б, в).
Появление импульсов на выходе РЭ обеспечивает формирование переменного сигнала
на выходе звена Д (рис. 1 д), постоянные времени которого выбираются таким
образом, чтобы передать выходные импульсы РЭ на вход выпрямителя В с минимальными искажениями.
(рис. 1 б, в).
Появление импульсов на выходе РЭ обеспечивает формирование переменного сигнала
на выходе звена Д (рис. 1 д), постоянные времени которого выбираются таким
образом, чтобы передать выходные импульсы РЭ на вход выпрямителя В с минимальными искажениями.
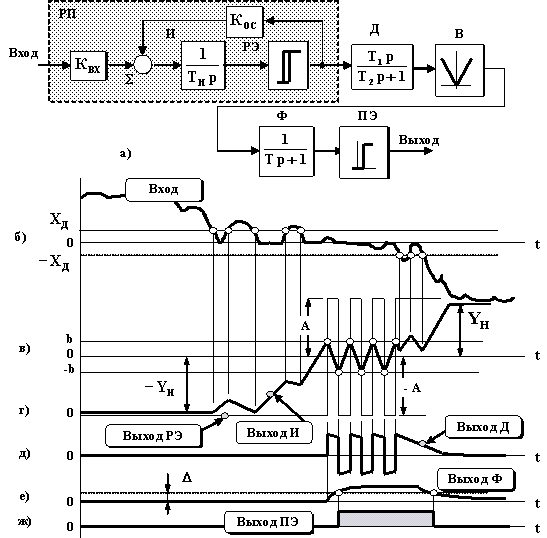
Рис. 1. Структурная схема (а) и временные диаграммы сигналов
(б - ж) однозонного аналогового интегрирующего датчика нулевого тока
В результате демодуляции и сглаживания выходного
сигнала блока Д на вход ПЭ подается постоянный сигнал (рис. 1 е), который
преобразуется в напряжение логической «1» (рис. 1 ж), что соответствует
нулевому уровню тока нагрузки ТП. Наличие интегратора в прямом канале ДНТ и его
работа в режиме «насыщения» исключает ложные срабатывания датчика под
воздействием импульсных помех, что характерно для ДНТ компараторного типа [2].
Использование в качестве информативной
координаты РП переменной составляющей выходных импульсов РЭ снижает жесткость
требований к дрейфовым параметрам интегратора и других элементов ДНТ, что
позволяет получить достаточно стабильный характер работы датчика при
коэффициентах его пропорционального усиления на уровне КП ≤ 300 (например, при использовании ОУ типа LM6171 National
Semiconductor).
Аналого-цифровой
датчик нулевого тока
ДНТ на рис. 2 а отличается от предыдущей
схемы способом фиксации нулевого значения входной координаты, для чего период
выходных импульсов РП преобразуется в цифровой код, который сравнивается с
заранее заданным значением, пропорциональным периоду автоколебаний РП при
нулевом уровне входного сигнала.
Для этой
цели здесь служат ключевой элемент Кл., одновибраторы ОВ1, ОВ2, генератор
счетных импульсов G стабильной частоты, элемент задержки DL,
счетчик СТ, регистр памяти RG, цифровой компаратор
ЦК, элемент Л1 «2И», элемент «nИ-НЕ», блок Л3 функции
«2ИЛИ» и источник опорного цифрового кода ИК. Интегратор И в цепи обратной
связи содержит нелинейный элемент НЭ с зоной нечувствительности |![]() | < |±YН|,
что уменьшает время задержки выхода ОУ интегратора из режима «насыщения» при
выполнении условия
| < |±YН|,
что уменьшает время задержки выхода ОУ интегратора из режима «насыщения» при
выполнении условия ![]() <
< ![]() .
.
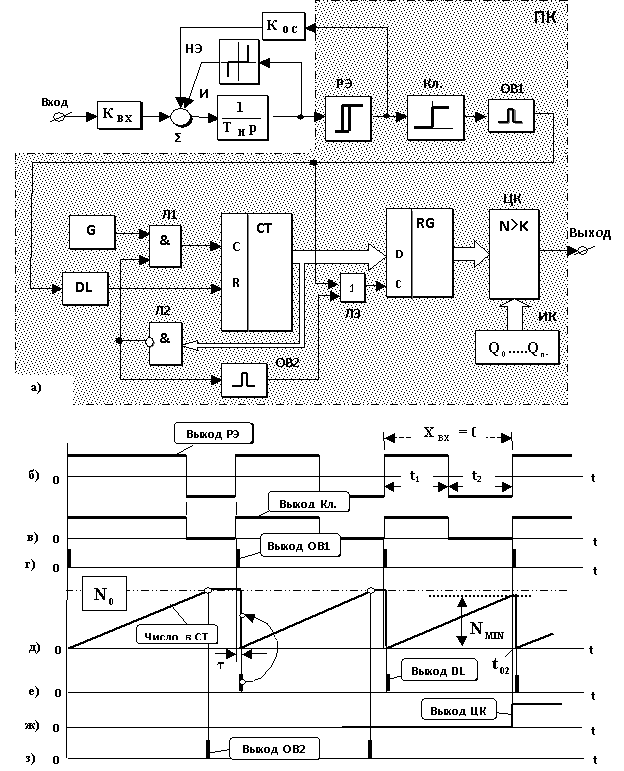
Рис. 2. Структурная схема (а) и временные диаграммы сигналов
(б – з) однозонного интегрирующего аналого-цифрового датчика нулевого тока
Ключ Кл. предназначен для преобразования
биполярных выходных импульсов РЭ в однополярный сигнал (рис. 2 б, в), что
необходимо для «стыковки» выхода РЭ с элементами цифровой электроники. ОВ1
формирует импульсы малой длительности синхронно с передним фронтом сигнала на
выходе Кл. (рис. 2 в, г), а импульс на выходе ОВ2 появляется при
достижении в счетчике заранее заданного числа N0 > NMIN (рис.2 д, з), когда Л2 переходит в нулевое
состояние и накопление числа в СТ прекращается. Запись данных в регистр RG
производится выходными импульсами ОВ1, а «обнуление» СТ осуществляется с
задержкой τ, формируемой с
помощью DL (рис. 2 г – е).
При уменьшении ![]() до нулевого значения
период следования импульсов на выходе РЭ становиться минимальным (рис. 2 б, t1 = t2) и соответствует числу
до нулевого значения
период следования импульсов на выходе РЭ становиться минимальным (рис. 2 б, t1 = t2) и соответствует числу ![]() , которое задается источником ИК. Здесь
, которое задается источником ИК. Здесь ![]() – период счетных
импульсов с выхода генератора G, причем
– период счетных
импульсов с выхода генератора G, причем ![]() <<
<< ![]() .
.
В этом случае ЦК переключается в состояние «1»,
фиксируя тем самым факт нулевого значения входной координаты.
Учитывая, что при t1 ≠ t2 соблюдается условие ![]() >
>![]() , цифровой компаратор ЦК сохраняет на выходе логический «0»,
запрещающий реверс ТП. Периодический запуск ОВ1 (фиг. 2 г) дублирует перенос
числа
, цифровой компаратор ЦК сохраняет на выходе логический «0»,
запрещающий реверс ТП. Периодический запуск ОВ1 (фиг. 2 г) дублирует перенос
числа ![]() в RG.
в RG.
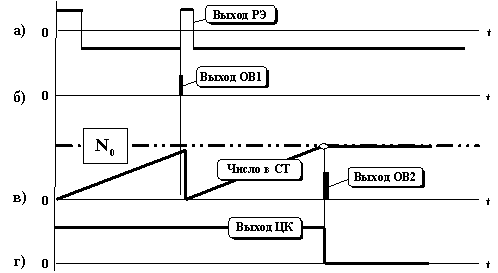
Рис. 3. Временные диаграммы сигналов однозонного
интегрирующего аналого-цифрового датчика нулевого тока при срыве автоколебаний
в развертывающем преобразователе
Если ДНТ вновь переходит в статический режим
(фиг. 3 а), то число в счетчике достигает уровня ![]() (фиг. 3 в). Под
действием импульса с выхода ОВ2 (фиг. 3 в) данные переносятся в RG,
а компаратор ЦК формирует сигнал логического «0» (фиг. 3 г). При этом счет
прекращается, так как состояние
(фиг. 3 в). Под
действием импульса с выхода ОВ2 (фиг. 3 в) данные переносятся в RG,
а компаратор ЦК формирует сигнал логического «0» (фиг. 3 г). При этом счет
прекращается, так как состояние ![]() в СТ обеспечивает
статический «0» на выходе Л2, блокируя прохождение счетных импульсов через Л1 с
выхода G на счетный С- вход счетчика СТ.
в СТ обеспечивает
статический «0» на выходе Л2, блокируя прохождение счетных импульсов через Л1 с
выхода G на счетный С- вход счетчика СТ.
Основные преимущества аналого-цифрового ДНТ
сводятся к следующему. Он является
системой с двойным интегрированием, что повышает степень помехоустойчивости ДНТ
как к внешним, так и внутренним помехам (первый канал интегрирования –
интегратор И, второй «интегратор» - счетчик СТ). Повышенная точность ДНТ
обусловлена цифровым алгоритмом фиксации значения ![]() , что позволяет увеличить быстродействие процесса обнаружения
«нулевого тока» в контролируемой цепи. Сохранение статического состояния
счетной схемы в периоды срыва автоколебательного процесса во входном контуре
датчика уменьшает вероятность самопроизвольного перехода цифрового компаратора
17 в состояние «1» под действием внешних помех, а также снижает уровень
внутренних помех в ДНТ от РП, который тот генерирует, например, через каналы
источника электропитания, работая в режиме автоколебаний. Кроме того, дискретно-цифровая
часть ДНТ, в которую целесообразно включить также РЭ (рис. 2 а),
достаточно просто реализуется на программируемом контроллере ПК. Интегрирующий
канал ДНТ в большинстве практических случаев целесообразно выполнять на
аналоговой основе, так как цифровое интегрирование не приводит к повышению
точности ДНТ, а лишь неоправданно увеличивает объем программной части
устройства.
, что позволяет увеличить быстродействие процесса обнаружения
«нулевого тока» в контролируемой цепи. Сохранение статического состояния
счетной схемы в периоды срыва автоколебательного процесса во входном контуре
датчика уменьшает вероятность самопроизвольного перехода цифрового компаратора
17 в состояние «1» под действием внешних помех, а также снижает уровень
внутренних помех в ДНТ от РП, который тот генерирует, например, через каналы
источника электропитания, работая в режиме автоколебаний. Кроме того, дискретно-цифровая
часть ДНТ, в которую целесообразно включить также РЭ (рис. 2 а),
достаточно просто реализуется на программируемом контроллере ПК. Интегрирующий
канал ДНТ в большинстве практических случаев целесообразно выполнять на
аналоговой основе, так как цифровое интегрирование не приводит к повышению
точности ДНТ, а лишь неоправданно увеличивает объем программной части
устройства.
Литература:
1. Осипов, О.И.
Промышленные помехи и способы их подавления в вентильных электроприводах
постоянного тока / О.И. Осипов, Ю.С. Усынин. – М.: Энергия, 1979. – 80 с.
2. Чернов Е.А., Кузьмин
В.П. Комплектные электроприводы станков с ЧПУ. Справочное пособие.- Горький:
Волго-Вятское книжное издательство, 1989.-320 с.
3. Цытович, Л.И.
Реверсивный тиристорный преобразователь для систем управления с питанием от
сети с нестационарными параметрами / Л.И. Цытович, Р.М. Рахматулин, М.М.
Дудкин, А.В. Качалов // Практическая силовая электроника. – М.: Изд-во ЗАО
«ММП-Ирбис», 2009. – № 2 (34). – С. 35–41.
4.
Качалов, А.В.
Интегрирующие устройства синхронизации для систем импульсно-фазового управления
вентильными преобразователями / А.В. Качалов, Л.И. Цытович, М.М. Дудкин //
Практическая силовая электроника. – М.: Изд-во ЗАО «ММП-Ирбис», 2010. – № 1
(37). – С. 42–51.
5.
Цытович, Л.И.
Интегрирующие развертывающие преобразователи с повышенной температурной
стабильностью характеристик / Л.И. Цытович, М.М, Дудкин, А.В. Качалов, О.Г.
Терещина, Н.А. Логинова. // Приборы и системы. – 2010. – № 10.
6. RU
2390906 Российская Федерация, МПК7 Н 02 М 1/08, G 06
G 7/12. Датчик нулевого тока / Л.И. Цытович, М.М. Дудкин,
А.В. Качалов, Р.М. Рахматулин. – № 2009114056/09; заявл. 13.04.09; опубл.
27.05.10, Бюл. № 15. – 8 с.
Цытович Леонид Игнатьевич – заведующий кафедрой электропривода (ЭПА)
Южно-Уральского государственного университета (ЮУрГУ), доктор техн. наук,
профессор, тел./факс 8 (351) 2 –
67 – 93 – 85, E – mail: tsli@susu.ac.ru
Брылина Олеся Геннадьевна - доцент кафедры ЭПА
ЮУрГУ, канд. техн. наук, тел. 8
(351) 2 67 – 93 – 21, E – mail: teolge@mail.ru
Дудкин Максим Михайлович – доцент кафедры ЭПА
ЮУрГУ, канд. техн. наук, тел. 8
(351) 2 67 – 93 – 21.
Рахматулин Раис Мухибович – ведущий инженер кафедры ЭПА ЮУрГУ, тел. 8 (351) 2 67 – 93 – 21.
АННОТАЦИЯ
Рассматриваются принципы построения датчиков
нулевого тока (ДНТ) на основе интегрирующих развертывающих преобразователей с
однозонной частотно-широтно-импульсной модуляцией, предназначенных, в
частности, для систем управления реверсивными тиристорными преобразователями с
раздельным управлением.
Приведены структуры аналогового и
аналого-цифрового ДНТ, их временные диаграммы сигналов.