УДК 621.317:531.768
Лисова А.І.
ДОСЛІДЖЕННЯ ТА КОМПЕНСАЦІЯ ПОХИБОК СИСТЕМИ КУТОВОЇ
ОРІЄНТАЦІЇ НА МІКРОМЕХАНІЧНИХ ГІРОСКОПАХ
Вступ
Використання для роботи
БІНС класичних параметрів орієнтації, таких, як, наприклад, кути
Ейлера-Крилова, продиктовано наявністю у них таких переваг, як наочна
геометрична інтерпретація і простота побудованих на їх основі диференційних
рівнянь, що обумовлює зниження обчислювального навантаження на бортовий
обчислювач і достатньо високу точність вирішення задач орієнтації і навігації.
Проте рівняння на основі кутів Ейлера-Крилова мають недоліки, пов’язані з
обмеженим діапазоном вимірюваних кутів. При досягненні кутом тангажа 90°
кінематичні рівняння вироджуються, що призводить до збою системи навігації.
Такі ж проблеми виникають при роботі БІНС у високих широтах і на
високоманеврених обєктах [1].
Диференційні рівняння в
кутах Ейлера-Крилова дають більш високу точність, що має місце при невеликих
величинах кутів тангажа та в умовах низьких широт. В той же час кватерніонні
алгоритми не мають особливих точок і практично не містять тригонометричних
функцій. Тому для вирішення задач орієнтації та навігації для об’єктів, що
здійснюють рух в області високих широт, або складні маневри по куту тангажа, можливо
використовувати перемикання між алгоритмами в кутах Ейлера-Крилова та
кватерніонними, а також використовувати ці алгоритми автономно [2]. Ці
алгоритми єбазою для побудови систем орієнтації.
В публікаціях досліджена
робота БІНС з урахуванням неідеальності сигналів приладів [3], але не побудовано
алгоритмів визначення похибки кутової орієнтації.
Постановка задачі
Проблема,
що вирішується в роботі, – дослідження впливу завад, які присутні в вихідних
сигналах гіроскопів на точність визначення кутів орієнтації для різних сигналів.
Завади являють собою кольоровий шум, як реальний вихідний сигнал гіроскопічного
сенсора
Алгоритми визначення кутової орієнтації за даними
мікромеханічних гіроскопів
Розробляється три алгоритми
визначення кутової орієнтації на основі кутів Ейлера-Крилова, рівнянь Пуасона
та рівнянь з кватерніонами [3]. Моделювання алгоритмів було
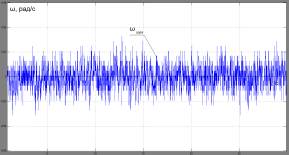
проведено для датчика ММГ ADXRS150. Вихідний сигнал гіроскопа та результати
моделювання показані на рис. 1 – 4.
|
Рисунок 1. Сигнал реального датчика |
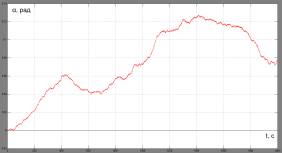
Рис. 2. Визначенння кутів орієнтації за допомогою кутів Ейлера-Крилова |
|
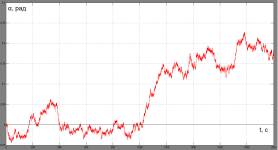
Рис. 3. Визначенння кутів орієнтації за допомогою рівнянь Пуасона |
Рис. 4. Визначенння кутів орієнтації за допомогою кватерніонних
рівнянь |

Порівняння точності роботи алгоритмів при моделюванні
експериментального вхідного сигналу на інтервалі часу 2000 с зі значеннями
похибок по кутам α, β, γ – Δα, Δβ, Δγ відповідно та значенням часу
моделювання в секундах показано в табл. 1.
Таблиця 1. Порівняння точності роботи
алгоритмів
|
|
Δα |
Δβ |
Δγ |
t |
|
Алгоритм
з використанням кутів Ейлера-Крилова |
0,1342 |
0,1174 |
0,1342 |
37 |
|
Алгоритм
з використанням рівнянь Пуасона |
0,2224 |
0,178 |
0,2226 |
42 |
|
Алгоритм
з використанням рівнянь з кватерніонами |
0,2345 |
0,1854 |
0,2347 |
44 |
Висновок
В ході досліджень було виявлено, що алгоритм з використанням кутів
Ейлера-Крилова дає найбільш високу точність визначення параметрів кутової
орієнтації, а також має кращу швидкодію в порівнянні з іншими досліджуваними
алгоритмами.
Література
1.
Исследование работы
БИНС в условиях высоких широт с учётом погрешностей реалных датчиков, Ю.Н.
Коркишко, В.А. Фёдоров и др. // «XVI С.-Пет. Междунар. Конф. по
интегрированным навигационным системам», май-2009г., стр. 157 – 160.
2.
«Бортовые системы
ориентации и навигации искусственных спутников Земли», С.Н. Анучин, И.Э.
Комарова, Л.Ф. Порфирьев, 2004г. Санкт-Петербург, стр. 222 – 227.
3.
«Управление и
наведение маневренных летательных аппаратов на основе современных
информационных технологий», М.Н. Красильщиков, Г.Г. Серебряков, 2005г. Москва