Строительство
и архитектура / 3.Современные технологии строительства, реконструкции и реставрации
Д.т.н, Гончаренко Д.Ф., Константинов А.С, к.т.н. Бондаренко Д.А
Харьковский национальный университет строительства и архитектуры
Календарное
планирование демонтажных работ
Демонтаж строительных конструкций представляет собой
сложный технологический процесс, состоящий из подготовительного и основного
периода.
Прежде всего, демонтажные работы характеризуются тем,
что доступ к конструктивным узлам объекта для обследования их состояния
зачастую становится возможным только в процессе его демонтажа. Это в общем
случае обуславливает неопределенность состава монтажных блоков и их технических
характеристик в худшем случае в течение всего периода проведения работ [1].
Следует
отметить, что демонтируемые объекты зачастую характеризуются уникальностью, в
том числе даже типовые объекты из-за индивидуального характера повреждений или
износа в ходе эксплуатации. Как следствие, для демонтажных работ, в отличие от
проектов нового строительства, отсутствуют аналоги или типовые решения.
Демонтаж
аварийных объектов часто осуществляется в стесненных условиях, обусловленных
окружающей застройкой, и создающих существенные помехи для монтажа, перемещения
и работы грузоподъемных машин, складирования, погрузки и транспортировки
монтажных блоков. При этом работы ведутся в условиях жесткого лимита времени
[2].
В
данной статье рассматривается задача типа «Компромисс: время-стоимость».
Формальная модель задачи включает в себя набор работ. Каждая работа
характеризуется количеством необходимых для ее выполнения возобновимых ресурсов
и дискретным множество возможных времен выполнения, обусловленным доступностью
ресурсов, а также функцией, определяющая зависимость между длительностью
выполнения работы и её стоимостью.
Таким
образом, требуется составить расписание, удовлетворяющее требованиям
минимизации общего времени выполнения проекта, а также его общей стоимости.
Решение
задач календарного планирования (КП) при демонтаже сопряжено со многими трудностями:
это, прежде всего, внезапность возникновения задач демонтажа из-за природных и
техногенных катастроф, что обуславливает невозможность предварительного
планирования и рационального распределения ресурсов; использование различных
типов ресурсов; сложность учитываемых связей между работами; необходимость
рассматривать различного рода трудно формализуемые и не формализуемые ситуации;
многокритериальность [2].
Рассмотрим
процесс демонтажных работ с использованием двух кранов разной мощности в
условиях ограниченности пространства из-за окружающей застройки.
Имеется
множество работ ![]() , которые могут быть выполнены первым краном за время
, которые могут быть выполнены первым краном за время ![]() , множество работ
, множество работ ![]() , которые могут быть выполнены вторым краном за время
, которые могут быть выполнены вторым краном за время ![]() (при этом
(при этом ![]() ) и множество работ
) и множество работ ![]() , которые могут быть выполнены только при совместной работе
обоих кранов. Однако при одновременном монтаже обоих кранов их рабочие зоны
перекрываются, вследствие чего снижается эффективность работы и возрастают
времена
, которые могут быть выполнены только при совместной работе
обоих кранов. Однако при одновременном монтаже обоих кранов их рабочие зоны
перекрываются, вследствие чего снижается эффективность работы и возрастают
времена ![]() и
и ![]() . Конечно, можно трактовать такие отношения, как совместное
использование ресурса «рабочее пространство», но существуют и другие работы,
стоимость и/или длительность которых зависят от порядка проведения.
. Конечно, можно трактовать такие отношения, как совместное
использование ресурса «рабочее пространство», но существуют и другие работы,
стоимость и/или длительность которых зависят от порядка проведения.
Такие
отношения выводят задачу за рамки классических постановок задач теории
расписаний.
Учет
особенностей демонтажных работ затрудняет, с одной стороны, построение
адекватных математических моделей, а с другой – разработку эффективных методов
решения.
Рассмотрим
задачу построения расписания работ проекта с учетом заданных нерефлексивных
отношений частичного порядка
(ограничений предшествования), указывающих на последовательность
выполнения операций и ограничений на ресурсы (англ. Resource-Constrained
Project Scheduling Problem, RCPSP).
В
задаче RCPSP необходимо построить оптимальное расписание проекта (выполнения
работ проекта) с учетом сетевого графика (отношений предшествования между
работами) и с учетом необходимых/доступных ресурсов, при котором будет
оптимизирована некоторая целевая функция.
Классическая
постановка задачи RCPSP имеет вид:
Дано
множество работ или требований N={1,2,...,n}
и K возобновимых ресурсов k=1,2,...,K, в каждый момент времени t доступно Qk единиц ресурса k.
Во время выполнения работы i требуется
qik ≤Qk
единиц ресурса k=1,2,...,K, после
выполнения работы ресурсы освобождается, и могут быть назначены на обслуживание
других работ. Заданы нормативные продолжительности реконструктивных работ pi ≥0 для каждой из
работ i=1,2,...,n исходя из
требуемого объема работы и принятых ресурсов для её выполнения.
Между
некоторыми парами работ заданы ограничения предшествования: i →j означает, что выполнение работы j начинается не раньше окончания работы i. Выполнение работ начинается в момент времени t=0, прерывания работ запрещены.
Необходимо
определить моменты времени начала выполнения работ Si,i=1,...,n, так, чтобы минимизировать время выполнения
всего проекта, т.е. минимизировать величину ![]() , где Ci =Si
+pi, не нарушаются отношения предшествования между работами,
т.е. Si +pi
≤Sj,
, где Ci =Si
+pi, не нарушаются отношения предшествования между работами,
т.е. Si +pi
≤Sj, ![]() i, j∈IN, i→j; в каждый момент времени t∈[0,Cmax] потребление ресурсов выполняемыми
работами не должно превышать величин Qk,
k =1,2,...,K.
i, j∈IN, i→j; в каждый момент времени t∈[0,Cmax] потребление ресурсов выполняемыми
работами не должно превышать величин Qk,
k =1,2,...,K.
Таким
образом, математическая модель задачи RCPSP записывается в виде:
![]() , (1)
, (1)
![]() , (2)
, (2)
Ci =Si +pi , i =1,2,...,n, (3)
Si +pi ≤Sj, ![]() i, j∈IN, i→j , (4)
i, j∈IN, i→j , (4)
 , k =1,2,...,K, (5)
, k =1,2,...,K, (5)
где ϕi(t)= 1, если требование i обслуживается в момент времени t и ϕi(t)=0.
Если,
как в нашем случае, не все ресурсы и не всегда одинаково могут быть доступны
для выполнения операций и доступность ресурса k в момент t задается
кусочно-постоянной функцией (в табличном виде), а продолжительность работы
зависит от количества занятых на ней ресурсов, то задача RCPSP в расширенной
постановке относится к мультимодальным задачам (англ. MRCPSP).
Зависимость
ресурса от времени называется профилем доступности ресурса (англ. time-dependent resource profile).
Если в любой момент времени t ресурс ri
может выполнять не более одной операции, т. е. можно считать, что Qk(t)∈{0, 1}, то такой ресурс называется
дизъюнктным. Ресурсы, способные выполнять более одной операции в некоторые
периоды времени, называются кумулятивными.
Для
задачи MRCPSP доступность ресурсов Qk(τ),
k =1,2,...,K, для работы i, продолжительность pim, стоимость vim и потребности в
ресурсах qimк, ![]() заданы в табличном
виде.
заданы в табличном
виде.
С
учетом дополнительных условий, математическая модель (1)-(5) преобразуется к
виду:
![]() , (6)
, (6)
![]() , (7)
, (7)
![]() (8)
(8)
Si +pim
≤Sj, ![]() i,
j∈IN, i→j,
m =1,2,...,Mi, (9)
i,
j∈IN, i→j,
m =1,2,...,Mi, (9)
 , k =1,2,...,K, m =1,2,..., Mi. (10)
, k =1,2,...,K, m =1,2,..., Mi. (10)
Для
каждой работы может быть задано временное окно [ri,di] – плановые сроки начала и завершения
работы i.
Кроме
того, следует учитывать вероятностный характер задачи, например, задавать для
каждой работы пессимистическую pim+
и оптимистическую pim-
оценки длительности, pim+≥
pim≥ pim-.
Так, задачи (1-5) и (6-10) являются примером задач с
времяориентированным критерием.
Решение данной задачи осуществлено с использованием
алгоритма «Муравьиные колонии». Основная идея, лежащая в основе этого алгоритма,
заключается в использовании механизма положительной обратной связи, который
помогает найти наилучшее приближенное решение в сложных задачах оптимизации.
Обозначим ![]() лучшее найденное расписание.
лучшее найденное расписание.
Зададимся значением параметров алгоритма m,
ρ, ![]() и
β, где m – количество итераций
(“муравьёв”), ρ∈[0,1] – скорость распада ферромона,
и
β, где m – количество итераций
(“муравьёв”), ρ∈[0,1] – скорость распада ферромона, ![]() и
β – коэффициенты эвристики, определяющие определяющая “стадность” и
“жадность” алгоритма. Все эти характеристики выбираются с учетом особенности
задачи на основе экспериментальных исследований (эвристики).
и
β – коэффициенты эвристики, определяющие определяющая “стадность” и
“жадность” алгоритма. Все эти характеристики выбираются с учетом особенности
задачи на основе экспериментальных исследований (эвристики).
Перед стартом полагают τij=τ0=1/(mTE), где TE – суммарное запаздывание
при EDD-расписании.
Параметры ηij,
![]() вычисляют один раз перед первой итерацией
одним из двух возможных способов:
вычисляют один раз перед первой итерацией
одним из двух возможных способов:
1. ηij =1/dj, i=1,2,...,n;
2. ηij =dj−rj,
i=1,2,...,n.
Каждая итерация состоит в запуске агента (“муравья”),
который “пытается” выбрать наилучший маршрут к оптимуму функции (“пище”), по
некоторому правилу, учитывающему “феромонные метки” своих предшественников.
Каждый муравей выполняет алгоритм LS, выбирая
требование j∈EL, исходя из значений параметров:
– предполагаемой выгоде ηij – эвристической информации о том, насколько
выгодным кажется перемена местами работы j и i в перестановке P=(j1,j2,...,jn):
– накопленной статистической информация τij о
качестве выбора для позиции i работы j (“след феромона“). Параметр показывает
насколько “выгодной” для работы j
оказалась позиция i в перестановке P
и корректируется после каждой итерации.
На каждом шаге вычисляются вероятности перехода ![]() по формуле:
по формуле:
Правило выбора на позицию i работы j определяется
случайным образом согласно распределению ![]() ,
если
,
если ![]() и по формуле
и по формуле ![]() в противном случае,
в противном случае, ![]() вычисляется случайно на каждом шаге.
вычисляется случайно на каждом шаге.
После того, как работа j была поставлена на позицию i
в перестановке, пересчитывается “локальный след” τij
=(1−ρ)τij +ρτ0.
После каждой итерации “глобальный след” τij
корректируется по правилу τij
=(1−ρ)τij +ρ/![]() если в “лучшем” найденном расписании на позиции i перестановки находится работа j.
Иначе τij
=(1−ρ)τij («испарение ферромона»).
если в “лучшем” найденном расписании на позиции i перестановки находится работа j.
Иначе τij
=(1−ρ)τij («испарение ферромона»).
Алгоритм дает хорошие результаты при интеграции в
него локального поиска, к примеру, попарной перестановки требований (если при
этом не нарушаются отношения предшествования). Локальный поиск можно запускать
после каждой итерации.
Предложенный метод решения реализован в виде
программы «Demontag_КП». В программе осуществляется на основе анализ
исходных данных выбор адекватной
математической модели и решение задачи в автоматическом режиме.
Главное
окно программы с сформированным (загруженным) проектом представлено на рис. 1.
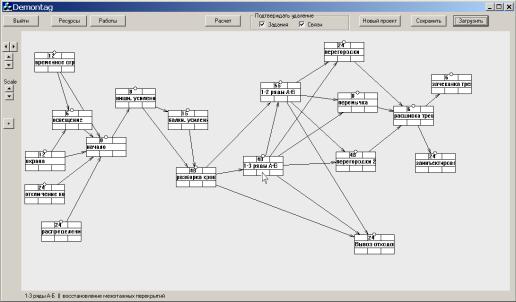
Рис. 1 – Главное
окно программы с загруженным проектом.
Разработанная
программа позволяет строить календарный план с заданными продолжительностями
работ, назначать необходимые ресурсы для работ, а также контролировать
соответствие выполнения работ и ресурсов заданным показателям.
Литература.
1.
Гончаренко Д.Ф., Твердоступ П.Б., Константинов А.С.
Исследование показателей, определяющих эффективность работ по демонтажу
строительных конструкций // Комунальне господарство
міст: наук.-техн. зб. – Харків: ХНАМГ, 2013. – Вип. 107. – С. 32-38.
2.
Azaron A., Perkgoz C., Sakawa M. A Genetic Algorithm
Approach for the Time-Cost Tradeoff in PERT Networks // Applied
Math. and Comput. – 168(2005). – S.
1317-1339.