К.т.н. Каверин В.В.,
Альжанова Д.К.
Карагандинский государственный технический университет
Параметрическая оптимизация
регулятора скорости электропривода
постоянного тока в режиме динамического торможения.
Современные машины и механизмы горного
производства оснащены регулируемым четырёхквадрантным электроприводом
постоянного тока. Учитывая, что генераторный режим электроприводов
анализируемого класса машин и механизмов используется в основном для спуска груза,
управления движением механизма под уклон в технологических режимах или
минимизации времени торможения и сокращения тормозного пути в аварийных режимах
[1] необходимо регулировать электромагнитный момент и угловую скорость.
Распространение в анализируемых классах машин и механизмов получил регулируемый
электропривод средней мощности до 100 кВт [2].
Исследование динамических характеристик
регулируемого электропривода выполняется с учётом следующих допущений:
- температура электродвигателя имеет постоянное
значение и соответствует работе электропривода при номинальных параметрах;
- маховые массы учитываются только
геометрическими размерами ротора электродвигателя;
- магнитный поток постоянный и равен номинальной
величине.
Основными требованиями к динамическим
показателям качества регулирования электропривода является величина
перерегулирования, время регулирования и число колебаний [3]. Параметрическая
оптимизация регулятора скорости электропривода в тормозном режиме выполнялась
для электродвигателя серии 4ПФ112S, технические
характеристики которого представлены в таблице 1.
Для построения систем регулирования в режиме
динамического торможения машин и механизмов, где с использованием генераторных
режимов реализуется технологическая операция спуска груза достаточно
одноконтурной системы регулирования с обратной связью по скорости.
Таблица
1. Технические характеристики электродвигателя серии 4ПФ112S
|
Марка электродвигателя |
РН, кВт |
wЭД Н, рад/сек |
ЕЯ Н, В |
IЯ Н, А |
МН, Н×м |
К*ФН, Вб |
LЯS, мГн |
RЯS, Ом |
J, кг×м2 |
|
4ПФ112S |
5,5 |
159 |
393 |
15 |
35,03 |
2,5 |
6,59 |
3,13 |
0,045 |
Объясняется это отсутствием высокодинамичных с
большой амплитудой возмущающих воздействий. В соответствии с рекомендациями,
изложенными в [3], в системе используется пропорционально – интегральный
регулятор. Функциональная схема одноконтурной системы автоматического
регулирования по скорости представлена на рисунке 1.
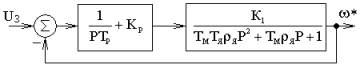
Рисунок 1 – Функциональная схема системы автоматического
регулирования по скорости.
Обобщённая
передаточная функция системы регулирования скорости по задающему воздействию,
имеет вид
|
|
|
(1) |
 ,
,
где
ТР и КР постоянная времени и статический коэффициент
передачи регулятора скорости соответственно.
В процессе параметрической оптимизации
регулятора контура скорости использованы корневые методы с диаграммой
Вышнеградского. В связи с этим передаточная функция системы преобразуется в
следующую форму.
|
|
|
(2) |
 ,
,С использованием
табличного редактора Excel и пакета прикладных
программ Matlab 7.0 получены диаграммы качества для электродвигателей,
технические характеристики, которых представлены в таблице 1. Зависимости
равного значения затухания для электродвигателя 4ПФ112S в функции КР
и ТР представлены на рисунке 2.
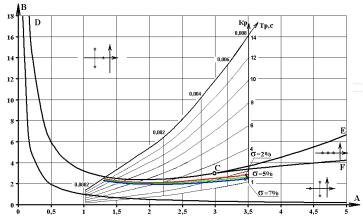
Рисунок 2 – Диаграммы качества для
контура регулирования скорости
На рисунке 2 представлены линии равного значения
затухания для перерегулирования s = 2, 5 и 7% системы с
обратной связью по скорости.
По рекомендациям [3] наибольшая степень
устойчивости соответствующая η0=1 имеет место в точке
"С" с координатами А=В=3.
Таким образом, в результате параметрической
оптимизации получены диаграммы качества для контура регулирования скорости с
диаграммами параметров регулятора ТР и КР. С
использованием табличного редактора Excel определены численные
значения коэффициентов А и В соответствующие перерегулированию 2, 5, 7 % для
электродвигателя марки 4ПФ112S.
Литература
1. Норматив по безопасности
забойных машин, комплексов и агрегатов //Утверждено Госпроматомнадзором СССР. –
М., 1990. – 102с.
2. Томас Хьюрманн, «Айкхофф
Бербаутехник ГмбХ», журнал «Глюкауф»,
2006, №4, - 18-21с.
3. Бесекерский В. А., Попов Е. П. Теория
систем автоматического регулирования. Издание третье, исправленное. - М.: Издательство «Наука»,, 1975,
768 стр.