Технические науки/ 2.
Механика
К.т.н., доцент - Д.С.Мырзалиев, к.т.н. -
А.Т.Нурмаганбетова,
к.т.н. - Н.С.Иманбаева
ЮКГУ им. М. Ауезова, г.Шымкент,
ИММаш им.У.А.Джолдасбекова, г.Алматы, Республика Казахстан
Проблема
синтеза приводной кинематической цепи многоконтурных механизмов с параллельной
топологией по оптимальной передаче силы
Задачи кинематического и динамического
синтеза механизмов, реализующих сложные программные движения на основе
использования многоконтурных замкнутых
кинематических цепей, составляют обширный раздел современной теории механизмов
и машин. Как указано в работах профессора Крейнина Г.В., Мисюрина С.Ю. и др.
[1], несмотря на прогресс в системах приводов, без применения передаточных
механизмов в конструкциях машин трудно обойтись. «Использование привода без
механизма не позволяет получить такие же качественные показатели, как и
комбинации привод-механизм. При этом вопросы выбора схемы и конструкции
механизма приобретают все большее значение». Как известно все большее
применение находят плоские и пространственные механизмы с многоконтурными
замкнутыми кинематическими цепями. Такие механизмы обеспечивают высокую
жесткость конструкции и надежное позиционирование перемещаемого объекта. В
последние десятилетия «появился принципиально новый вид приближенных
направляющих механизмов, основанных на структурных группах высоких классов,
имеющих замкнутые контуры с четырьмя и более кинематическими цепями». Их
особенность заключается в том, что они позволяют получить значительный ход
рабочей точки выходного звена, хотя и являются более сложными по конструкции.
Среди них наиболее распространены механизмы с одной степенью свободы,
предназначенные для получения движения по траектории, близкой к прямой, дуге
окружности или другому типовому закону. Таким механизмам часто отдают
предпочтение ввиду простоты и экономичности решения задачи с помощью одного
привода и одного механизма.
Известно, что синтез приближенно
направляющих механизмов со структурными группами Ассура высоких классов
представляет сложную задачу: отсутствуют регулярные методы выбора структуры
механизма, поэтому решающую роль играют интуиция и опыт проектировщика. Далее
возникает задача определения размеров звеньев. В таких сложных структурах
характер движения выходного звена может в корне измениться даже при
незначительном изменении размера любого из звеньев.
Одной из наиболее сложных задач
структурного и размерного синтеза механизмов является проблема выбора способа
включения привода в схему механизма – специфическая проблема, характерная для
систем с многоконтурными механизмами
сложной структуры. При традиционной установке привода между неподвижным звеном
(основанием) и одним из звеньев существенно возрастает опасность появления
особых положений механизма, но их можно избежать, если установить привод между
двумя подвижными звеньями. Возникают механизмы, которые нельзя традиционным
способом отнести к существующей классификации Ассура–Артоболевского.
Так, на рисунке 1 изображен многоконтурный механизм навески плуга с высотным регулированием глубины вспашки.
Стойка навески с неподвижно прикрепленным корпусом плуга создает вращательные
пары В и С с вращающимися вокруг
неподвижной оси А рамы трактора
нижним звеном 1 и верхним звеном 3, также вращающимся относительно оси D рамы
трактора. А звено 1 образует шарнир с раскосом 5.
Рассматривались различные варианты привода
данного механизма с помощью «качающегося гидроцилиндра». При всех возможных
вариантах соединения гидроцилиндром смежных пар звеньев получающиеся
структурные схемы механизмов относятся к механизмам второго класса по Ассуру,
но дальнейший опыт их проектирования показал, что для удержания нагрузки от
рабочего органа требуются значительные усилия в гидроцилиндре. Результатом
является высокая стоимость гидроцилиндра, значительные потери мощности, большие
реакции в шарнирах, и как следствие, низкий КПД механизма.
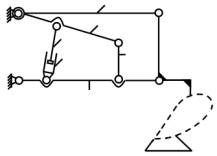
Рисунок 1 -
Механизм навески плуга с высотным регулированием глубины вспашки
Поскольку отсутствовала необходимая
теоретическая база для исследования, после многократного опыта путем проб и
ошибок конструкторами предложена следующая схема привода. Вращающееся
относительно оси D рамы трактора плечо 4 подъемного механизма входит во вращательные пары Е с раскосом 5 и G со штоком гидроцилиндра, цилиндр которого 6 образует шарнир Н с
нижним звеном 1. В результате
механизм относится к механизмам высоких классов с заданным относительным движением подвижных звеньев (ЗОД ПЗ). Звенья 1-5-4-6-7
при запирании гидроцилиндра 6-7
(образуют условное звено У)
представляют собой условную группу Ассура (УГА) 1-5-4-У.
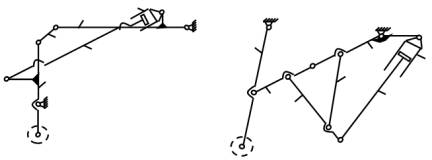
Возьмем другой пример из практики
конструирования рациональных схем привода механизма шасси самолета (рисунок 2). На рисунке 2, а
звено 1 с колесом, вращающееся вокруг
неподвижной оси А рамы самолета,
входит в кинематическую пару В со
звеном 4, а последнее соединено со
звеном 2, вращающемся вокруг
неподвижной оси D рамы самолета. В момент наступления контакта колеса с
опорной поверхностью происходит мгновенное силовое нагружение и сложной задачей
является удержание этой нагрузки минимальным усилием в гидроцилиндре.
Рассматривая различные варианты привода механизма подъема шасси, путем
сравнения результатов разработана предложенная оптимальная конструкция.
Полученная схема представляет собой механизм IV класса с условной группой Ассура 1-4-2-У, где кинематическая цепь 3-5 гидроцилиндра при запирании образует условное звено У. При соединении конца цилиндра 3 к стойке возникают колоссальное усилие
в цилиндре. Также непригодны схемы привода, в которых цепь цилиндра соединяет
смежные пары звеньев. Таким образом, большими возможностями обладает полученный
механизм высокого класса.
Дальнейшее развитие схемы привело к
увеличению числа звеньев. Так, многозвенное убирающееся шасси коромыслового
опирания (рисунок 2, б) представляет
собой двухконтурный механизм высокого класса. Здесь подвижные изменяющиеся
контуры образованы контурами CEFGC и GFJHG.
a) б)
Рисунок
2 - Убирающееся шасси шарнирного опирания
(а) и многозвенное убирающееся шасси
коромыслового опирания (б)
Однако полученные механизмы разработаны на
основе эвристических соображений. Единая методика синтеза входной
кинематической цепи механизмов
параллельной топологии с ЗОД ПЗ по условию оптимальной передачи силы от
приводной цепи к выходному звену (рабочему органу) до сих пор не разработана и
представляет собой важную проблему.
В связи с вышеизложенным возникает ряд
актуальных задач анализа и синтеза рычажных механизмов, в которых приводная
кинематическая цепь образована из подвижных звеньев. Методы кинематического,
кинетостатического и динамического анализа плоских рычажных механизмов в
которых входные звенья образуют кинематическую пару со стойкой и закон движения
их задан относительно стойки, разработаны в ТММ достаточно полно [2, 3 и др].
Эти методы основываются, как известно, на принципе Ассура формирования
стержневых механизмов, согласно которого структурная схема любого рычажного
механизма образуется путем наслоения статически определимых групп Ассура на
систему «входные звенья-стойка». Однако применительно к механизмам, в которых
задано относительное движение одной или нескольких пар подвижных звеньев,
принцип наслоения должен быть видоизменен.
Таким образом, существующие исследования в
основном касались проблемы классификации механизмов с ЗОД ПЗ, вопросов
исследования кинематики и кинетостатики. Задача оптимального выбора схемы
привода и оптимального синтеза входной кинематической цепи из условия
оптимальной передачи усилия от привода к рабочему органу в существующих
исследованиях не рассматривалась.
Между тем, плоские рычажные механизмы с
ЗОД ПЗ представляют значительный практический интерес при разработке
грузоподъемных устройств. С развитием всех отраслей производства возникла
потребность в создании грузоподъемных механизмов (ГПМ), относящихся к
подъемно-транспортному машиностроению, с большим спектром применения: складские
комплексы, магазины, производственные цеха, автосалоны, театры,
специализированные выставки, при погрузочно-разгрузочных работах. Особое
отличие ГПМ в том, что они легки в эксплуатации и предельно просты по принципу
действия.
При этом главным препятствием является
отсутствие фундаментальной теоретической базы для исследования (анализа и синтеза) возникающих в ГПМ
специфических механизмов высоких классов с ЗОД ПЗ.
Литература:
1. Крейнин Г.В., Мисюрин С.Ю. Выбор схемы включения привода в структуру механизма при решении задач кинематического синтеза. – Проблемы машиностроения и надежности машин, 2008, №1., с.3-8.
2. Джолдасбеков У.А., Бияров Т. Основы динамики механизмов высоких классов со многими степенями свободы // Изв.АН РК: Сер. Физ.–мат. – 1993. № 1. – С. 67–72.
3. Кожевников С.Н., Кузовков Е.Г.
Кинематический анализ механизмов с двигателем на подвижном основании. – Теория
механизмов и машин, вып.8. – Харьков, 1970. – 137 с.