*112780*
Математика/5. Математическое моделирование
Д.т.н. Тарануха Н.А., к.т.н. Петрова
А.Н., Любушкина Н.Н.
Комсомольский-на-Амуре
государственный технический университет МАТЕМАТИЧЕСКОЕ И ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ КОЛЕБАНИЯ СТЕРЖНЕВЫХ СИСТЕМ С
ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ С БОЛЬШИМИ ПЕРЕМЕЩЕНИЯМИ УЗЛОВ
Большие перемещения узлов конструкции
возникают либо при больших деформациях стержней, либо из-за геометрических
особенностей конструкции и направления и точки приложения сил к ней. Первый вариант
описывается в уравнениях через закон деформирования, а второй учитывается
при геометрически нелинейном описании
задачи.
Рассмотрим конструкцию, в которой
сочетаются обе причины. Пример такой системы, приведен на рис. 1. Узел и3 в результате нагружения
силой Р будет совершать большое
перемещение, так как углы наклона a1 и a2 стержней
1 и 2 будут значительно увеличиваться, к тому же материал, из которого выполнены
стержни относится к гиперупругим, т.е. допускающим до 100 и более процентов
деформации.

Рис. 1 Схема нагружения конструкции
Постановка
задачи. Груз массой М1
подвешен на двух стержнях, выполненных из материала, имеющего нелинейный закон
деформирования. Масса груза изменяется в результате удара до М∑,
поэтому появляется динамическая составляющая в процессе деформирования и узел и3 совершает колебания.
Составим математическую модель задачи. В нее войдут:
- уравнения равновесия:
N1m1+N2m2=Px,
N1n1+N2n2=Py,
- условия геометрической неизменности [1]:
l1 m1+l2
m2= l01 m01+l02 m02,
l1 n1+l2
n2= l01 n01+l02 n02,
m12+ n22=1,
m12+ n22=1,
- закон деформирования [2]:
 ,
,
- уравнение, описывающее связь между
перемещением узла и деформацией в стержнях в общем виде:
Dli=f(q3),
(в данном случае Dli можно найти из соотношений треугольника или как расстояние
между двумя точками с заданными координатами)
- дифференциальное уравнение колебания
узла:
![]() , (1)
, (1)
где Ni – усилие в i-том стержне;
mi=cos(ai), ni=sin(ai) – направляющие косинусы стержня i после нагружения к осям X и Y соответственно;
m0i, n0i – направляющие косинусы стержня i до нагружения;
Px, Py – проекции суммарной силы, приложенной к узлу 3 на соответствующие оси;
li, l0i – длина стержня до и после деформации;
![]() - деформация стержня i;
- деформация стержня i;
F(![]() ) – площадь поперечного сечения при деформации
) – площадь поперечного сечения при деформации ![]() ;
;
Е(![]() ) – приведенный модуль упругости деформации
) – приведенный модуль упругости деформации ![]() [2];
[2];
b – коэффициент сопротивления среды (внутренней и внешней);
МС – суммарная масса, сосредоточенная в узле конструкции;
СS(Δl) – суммарный коэффициент жесткости стержней.
Первая часть
системы уравнений описывает статику, а последнее уравнение динамику системы.
В уравнении (1) учитывается, что при большой деформации циклическая частота и коэффициент затухания зависят от жесткости системы, уравнение является нелинейным относительно жесткости.
Была выдвинута гипотеза: искать решение
дифференциального уравнения квазигармонических колебаний (1) для больших
деформаций в виде [2]:
![]() . (2)
. (2)
Начальные условия для задачи определены
следующие:
q(t, CS(Δl)) = q0; q/(t, CS(Δl)) = q0/. (3)
Главной
особенностью закона колебания является то, что частота, коэффициент затухания,
амплитуда и начальная фаза колебания зависят от существующих в конкретный
момент времени в колеблющейся системе удлинения и фактической жесткости
системы. Данное обстоятельство стало главным при выполнении итерационной
процедуры расчета.
Решение (2) было
получено с учетом независимости функций, входящих в данное уравнение, поэтому
оно требует корректировки учета нелинейности входящих функций.
Для расчета предлагается следующий численный алгоритм поиска решения. Каждая итерация процедуры расчета состоит из следующих шагов:
ti = t0 + i ∙ h,
где h - шаг по времени
Δli = f(qi, q0),
![]() .
.
Общее решение q(t) уравнения (1) для динамической системы найдено в
виде суммы двух составляющих: динамического qд(t) описываемого уравнением (2) и смещения qс от действия статического нагружения [1] (по
приведенной выше математической модели):
![]() .
.
Значения функций l1(CS( Dli)), b(CS( Dli)), А(CS( Dli)) и ![]() (CS( Dli)) уточняются
на каждом шаге итерации для соответствующего удлинения Δli и фактической жесткости CS(Δli),.
(CS( Dli)) уточняются
на каждом шаге итерации для соответствующего удлинения Δli и фактической жесткости CS(Δli),.
Полученное таким
образом решение является численным, параметрически зависимым от коэффициента
жесткости системы CS (Δl).
Для подтверждения
правильности предложенного решения был проведен эксперимент для рассчитываемой
конструкции (рис. 1). На рис. 2 приведены графики колебательных процессов.
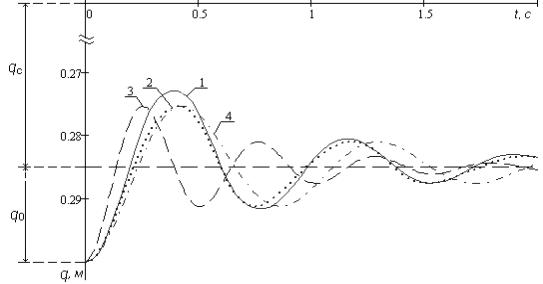
Рис. 2 Графики колебаний: 1 –
эксперимент; 2 – расчет по предлагаемой
математической модели итерационно с пересчетом жесткости; 3 – расчет
без пересчета жесткости, 4 – решение уравнения (2) методом Рунге-Кутта
Из рис. 2 видно, что предложенная математическая модель и форма решения колебания стержневых систем с одной степенью свободы с большими перемещениями дает вполне удовлетворительные результаты, среднее значение среднеквадратичного отклонения составляет 0,004 % (методом Рунге-Кутта – 1,6 %).
Предложенные математическая модель и ее численное решение были использованы при расчете гидробиотехнического сооружения и дали хорошие результаты [3].
ЛИТЕРАТУРА
1. Тарануха, Н.А. Математическая модель шарнирной стержневой системы с большими перемещениями узлов. /Н.А.Тарануха, К.В.Жеребко, А.Н.Петрова, М.Р.Петров //Известия вузов. Строительство, 2003, № 3 – С. 12–18.
2. Тарануха, Н.А. Математическое моделирование колебательных процессов в стержне с большими деформациями /Н.А.Тарануха, А.Н.Петрова, Н.Н. Любушкина; ГОУВПО «КнАГТУ». –Комсомольск-на-Амуре: –2007. –19 с. –Деп. в ВИНИТИ 26.09.2007. 903-B2007.
3.
Тарануха, Н.А.
Механика морских динамических систем с большими деформациями из
нестандартизированного материала /Н.А. Тарануха, А.Н. Петрова, Н.Н. Любушкина.
//Морские интеллектуальные технологии, 2010, №3 (9) –С. 56-59.