*112732*
Шеломенцев Е.Е., студент
Научный руководитель:
Александрова Т.В., ассистент каф. ИКСУ
Томский политехнический университет,
Россия
Управление роботом андроидного типа с помощью сенсора
Kinect
Введение
Многообразные задачи, которые ставятся перед роботом – андроидом, могут
быть выполнены с использованием различных методов управления. В 2010 году
появился сенсор Microsoft Kinect, который открывает новые возможности для управления робототехническими
объектами, используя методы технического зрения для идентификации различных
входных сигналов[1].
Формирование управляющих воздействий происходит на основании считанных с
сенсора входных сигналов, которыми могут быть любые движения и позы человека,
что позволяет создать более гибкую систему ввода данных.
Сущность метода заключается в определении положений тела оператора в
пространстве, на основании которых формируется управляющий сигнал для робота.
Существует возможность расширения количества каналов ввода данных за счёт
использования звукового канала (голосовое управление).
Рассмотрим реализацию данного метода управления на примере робота –
андроида BIOLOID (производства компании ROBOTIS, Ю. Корея). Собранный робот может быть оснащен различными
сенсорами (IR-sensor, Distance Measurement Sensor, Touch
Sensor, Gyro Sensor), сервоприводами, камерами технического зрения
и т.д. (рис.1), что позволяет применять различные приемы для обработки событий
окружающей среды. Использование этих сенсоров поможет стабилизировать робота в
вертикальном положении и наладить связь робота с удаленным сервером обработки
входных сигналов с Kinect.
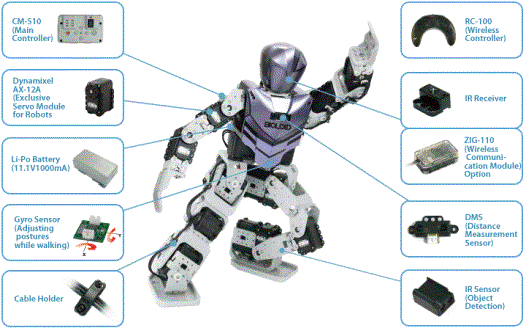
Рис.1.Набор
«Bioloid»
Управление роботом с помощью сенсора Kinect
В 2010 году
компания Microsoft выпустила «контроллер без контроллера» для Xbox
360. Основанный на добавлении периферийного устройства к игровой приставке Xbox
360, Kinect позволяет пользователю взаимодействовать с ней без помощи игрового
контроллера через устные команды, позы тела и показываемые объекты или
рисунки.[2]
Для
реализации алгоритма управления андроидом посредством сенсора Kinect,
последний должен постоянно считывать положение 25 контрольных точек,
расположенных на теле оператора (в том числе координаты плечевых, локтевых,
тазобедренных и коленных суставов). Постоянный мониторинг этих значений,
переведённых в систему робота, позволяет найти требуемые углы поворотов
двигателей, осуществляющих перемещения конечностей. Для определения перемещений
сервомоторов робота, обеспечивающих требуемое положение конечностей андроида
необходимо решить обратную задачу кинематики.
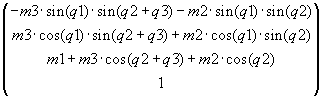 ,где 1, 2, 3 строки соответственно зависимости x, y, z.
,где 1, 2, 3 строки соответственно зависимости x, y, z.
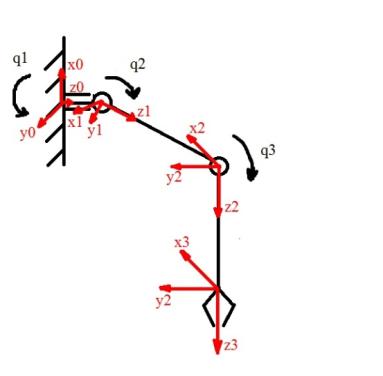
Рис.2. Кинематическая
схема конечности робота
Искомые величины (углы поворотов) находим путём
подстановки в эти зависимости требуемых координат звена.
Для управления звеньями
робота необходимо создать программу, считывающую координаты тела оператора в
пространстве и генерирующую на их основе управляющие воздействия на
сервоприводы робота.
Выводы
Рассмотренный метод
управления является достаточно перспективным, так как не требует от оператора
особых навыков.
К достоинствам данного
метода также можно отнести:
-
Возможность
формирования управляющих команд для робота в режиме реального времени.[4]
-
Расширение
возможностей взаимодействия робота с внешней средой (манипуляции с предметами).
-
Возможность
записи определённых движений и вызова их с помощью голосовых команд.[5]
-
Отсутствие
необходимости ношения дополнительного оборудования, такого как экзоскелет и
т.п., которое во многих случаях стесняет движения оператора.
Применение сенсора Kinect нивелирует ряд
недостатков, присущих другим биотехническим методам управления, однако имеет и
ряд недостатков:
-
Необходимость
создания программного обеспечения, которое будет трансформировать входные
сигналы с Kinect, в управляющие сигналы для сервомоторов робота
-
Необходимость
корректировки движений, вносящих дисбаланс в системы робота, который может
привести к падению. Корректировка должна проводиться учётом различного
положения центра масс человека и центра масс реального робота.
-
Скорость
обработки программного преобразователя входных сигналов
в управляющие не является постоянной.
-
Отсутствие
обратной связи с роботом, что снижает эффективность управления при
взаимодействии робота с внешней средой
Несмотря на указанные
недостатки, применение сенсора Kinect для управления роботом
андроидом является наиболее удобным для оператора.
Источники
1. Billingsley J. Ed., Mechatronics
and Machine Vision: Future Trends, 2003, c 71-78.
2. http://research.microsoft.com/en-us/um/redmond/projects/kinectsdk/
3. De Silva, Clarence W., Mechatronics:
an integrated approach, 2004, c 260-263.
4. http://www.youtube.com/watch?v=ycrlhH6YVAM
5. http://www.youtube.com/watch?v=3iI9Cv6SRK4&feature=related