Современные информационные технологии/Компьютерная инженерия
Мясищев А.А.
Хмельницкий национальный университет, Украина
Web – сервер на ATmega1280 + Wiznet W5100 с размещением
данных в памяти программ
Создание систем управления по
TCP/IP сети
требует построения на микроконтроллерах устойчиво работающего web – сервера. Распространенным способом является
использование микроконтроллеров фирмы AVR и Ethernet контроллеров
фирмы Wiznet - W5100 и фирмы Microchip - ENC28J60. В микросхеме Wiznet W5100 стек протоколов TCP/IP и Ethernet
является встроенным, а у ENC28J60 встроенным является лишь протокол Ethernet.
В работе используется сервер
на базе чипа Wiznet W5100 т.к. протокол TCP/IP
встроен в него на аппаратном уровне, а это значительно упрощает программу сервера
и уменьшает требуемый размер оперативной памяти микроконтроллера. В этом случае
нет необходимости писать программу для реализации протокола TCP/IP на
микроконтроллере. Необходимо лишь реализовать протокол HTTP.
Другой причиной выбора Wiznet W5100 является его распространенность на
коммерческом рынке в виде различных автономных модулей, что говорит об
устойчивости его работы во встраиваемых сетевых устройствах управления.
Предлагаемый здесь web –
сервер должен обладать следующими особенностями по сравнению с представленным HTTP – сервером в статье [1]:
1.Аппаратная часть реализована на AVR
микроконтроллере ATmega1280 и микросхеме Wiznet W5100.
Указанные схемы установлены в модулях Arduino Mega и Ethernet Shield W5100[2].
2.К серверу подключен температурный датчик DS18B20.
3.Сервер может пересылать клиенту кроме текста также и изображения. Эти
данные хранятся в flash памяти микроконтроллера в виде
массивов байт.
4.Размер данных, размещенных в Flash
памяти, может превышать 64Кбайт. Программная
среда Ардуино этого не делает для микроконтроллеров AVR[2].
5.Сервер должен работать устойчиво, не «зависать», что характерно для
программной среды Ардуино и программы в статье [1]. Это очень важно при
создании надежных систем удаленного управления.
6. К
серверу должен быть подключен мобильный телефон, который дозванивается при
срабатывании концевого выключателя. Дозвон может быть инициирован удаленно от
сервера, если в браузере набрать заданный адрес. Если абонент примет вызов, то
он сможет прослушивать удаленно район расположения сервера.
Основные сведения о TCP/IP контроллере Wiznet W5100
В Wiznet W5100 реализован полнофункциональный стандарт IEEE 802.3 (физический и канальный уровень
протокола Ethernet), стек TCP/IP
протоколов. Поэтому программирование Wiznet W5100 состоит в чтении и записи
данных, которые находятся во внутренних регистрах, значения которых изменяются
при работе стека TCP/IP.
Работа с регистрами выполняется либо параллельно с использованием шин адреса и
данных или последовательно с помощью шины SPI. В
работе управление чипом W5100 выполняется через шину SPI. На
рисунке 1 показана связь между ATmega1280 и Ethernet Shield W5100 по шине SPI.
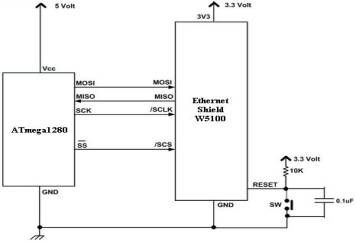
Рис.1. Связь ATmega1280 и W5100 по SPI
Здесь Wiznet W5100 выступает в качестве ведомого
устройства SPI, а микроконтроллер ATmega1280 в качестве ведущего. Для
реализации протокола SPI нужно
как минимум четыре сигнала т.е. MOSI (выход
ведущего/вход ведомого), MISO (вход
ведущего/выход ведомого), SCK
(сигнал синхронизации от ведущего) и CS (выбор
ведомого). Микроконтроллер поддерживает все режимы SPI (т.е. 0,1,2 и 3), Wiznet W5100 чип поддерживает – только режим
0 и режим 3. В работе используется режим 0 шины SPI. Не
используется режим прерывания для W5100, поэтому вывод прерывания не
задействован (как и для программно – аппаратной среды Ардуино).
Рассмотрим построения сервера
на Wiznet W5100.
1. Инициализация Wiznet W5100 по шине SPI.
Для инициализации необходимо выполнить соответствующие записи в регистры
режима работы MR, маски сети SUBR, MAC –
адреса SAR, IP –
адреса SIPR, регистра памяти приема – RMSR и регистра памяти передачи данных - TMSR. На рисунке 2 показана карта памяти Wiznet W5100.
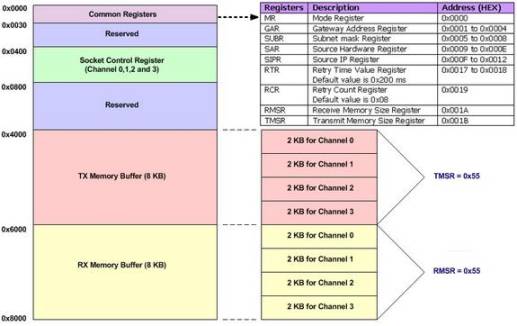
Рис.2. Карта памяти Wiznet W5100
Все регистры адреса контроллера W5100
являются 16-разрядными, а его собственные регистры – 8 разрядными. Поэтому,
используя 8 – разрядный микроконтроллер ATmega1280 по
шине SPI записываем или читаем сначала первый 8-и битный старший
байт, а потом следующий 8-и битный младший байт регистра адреса W5100. Для
записи данных в Wiznet W5100 необходимо по SPI
вначале передать команду 0xF0, а
при чтении данных - команду 0x0F. Для записи и чтения по шине SPI в программе используются функции SPI_Write() и SPI_Read().
Wiznet W5100 поддерживает до 4-х одновременных каналов или
sockets, причем каждый из каналов
имеет свой собственный адресный регистр, контролирующий операции. Все эти
каналы поддерживают 8-ми килобайтный буфер для передачи и 8-ми килобайтный
буфер для приема. При инициализации Wiznet W5100 необходимо на каждый канал
распределить конкретную величину памяти путем записи необходимых значений в
регистры RMSR и TMSR.
Например, для того, чтобы распределить на каждый канал по 2 Кбайта памяти, выполняется код:
SPI_Write(RMSR,0x55);
SPI_Write(TMSR,0x55);
За инициализацию W5100 отвечает
функция W5100_Init()
программы на Си. В этой функции:
- Записывается 0x80 в W5100 в
регистр режима MR по адресу 0x0000, что означает программный сброс W5100;
- Записываются по адресам с 0x0001 по
0x0004 в регистр GAR
(регистр шлюза) четыре байта, представляющие собой адрес основного шлюза;
- Записываются по адресам с 0x0005 по 0x0008
четыре байта в регистр SUBR
(регистр маски), представляющие собой маску сети;
- Записываются шесть байт MAC адреса
сервера в SUBR по адресам с 0x0009 по 0x000E;
- По адресам с 0x00F по 0x0012
записывается 4-е байта IP –
адреса сервера.
Необходимо отметить то, что уже
после инициализации должна работать команда ping на
установленный ip – адрес.
2.Программная реализация web – сервера
Web - сервер использует простой
текст под названием язык гипертекстовой разметки (HTML) для взаимодействия с
браузером (клиентским приложением) через протокол TCP/IP. Поскольку протокол TCP/IP
реализован в Wiznet W5100, необходимо написать программу для
микроконтроллера для реализации протокола HTTP. Сервер
работает прослушиванием любого запроса от браузера клиента для любого HTTP запроса GET или POST через стандартный
TCP/IP порт
номер 80 (в рассматриваемой работе порт 8080). После посылки запроса от клиента
согласно стандарту сервер, ответит ему HTTP
заголовком
HTTP /1.0 200 OK
Content-Type: text/html
И пустой строкой
После этого сервер перешлет весь HTML текст
клиенту, а затем автоматически прервет установленное соединение с клиентом (см.
рисунок 3).
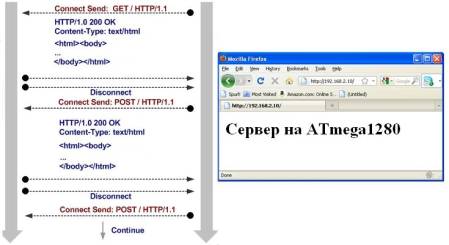
Рис.3. Схема взаимодействия клиента и сервера
Ниже в качестве примера представлены запрос браузера клиента и ответ на
него сервера:
Client Request:
GET / HTTP/1.1
Host: 192.168.2.101
User-Agent: Mozilla/5.0 (Windows; U; Windows NT 5.1;
en-US; rv:1.9.2.3) Gecko/20
100401 Firefox/3.6.3
Accept: text/html,application/xhtml+xml,application/xml;q=0.9,*/*;q=0.8
Accept-Language: en-us,en;q=0.5
Accept-Encoding: gzip,deflate
Accept-Charset: ISO-8859-1,utf-8;q=0.7,*;q=0.7
Keep-Alive: 115
HTTP Server Response:
HTTP/1.0 200 OK
Content-Type: text/html
(Здесь
пустая строка!)
<html>
<body>
<h1>Сервер на ATmega1280</h1>
</body>
</html>
Получив ответ от сервера, клиент представит HTML текст и, если есть, то и изображения на экране браузера. Функции микроконтроллера
состоят в том, чтобы правильно обрабатывать полученный запрос от клиента и
отправлять необходимую в соответствии с запросом информацию клиенту. В связи с
этим рассмотрим последовательность работы микроконтроллера ATmega1280 и Wiznet W5100.
Для
настройки и управления Wiznet W5100 в режиме web –
сервера необходимо записывать и считывать информацию в регистр управления
сокетом, а также в буферную память, в которую выполняется получение RX и передача TX данных
с сети. Для простоты в этом сервере реализован только один канал (сокет 0) из
четырех поддерживаемых контроллером W5100.
Это достаточно для реализации простого web –
сервера, позволяющего не только выполнять управление удаленными устройствами по
сети и считывать информацию с датчиков, но и отображать небольшие объемы
информации на браузере. Регистры управления для сокета 0 Wiznet W5100
начинаются с адреса 0x400 и
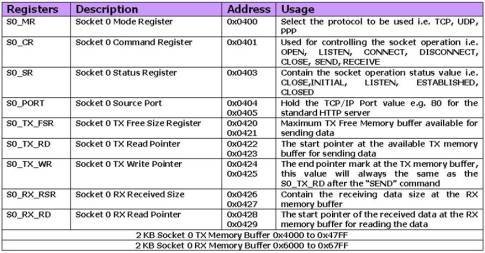
заканчиваются адресом 0x4FF. В таблице 1 представлен список управляющих регистров
для сокета 0 при условии использования буферной памяти приема RX и передачи TX данных размером по 2Кбайт для этого сокета.
Таблица 1. Регистры управления
Рассмотрим последовательность
работы web – сервера по программе, написанной на Си, полный
текст которой можно посмотреть в Интернет - источнике[3].
Для работы сервера основой
является использование командного регистра S0_CR, а также чтения и запись данных в буфер W5100. Диаграмма на рисунке 4 показывает, в какой
последовательности происходит работа с регистрами и буферами памяти TX, RX.
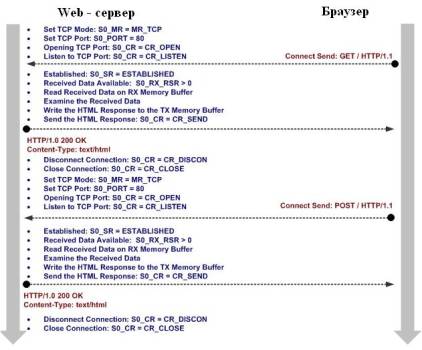
Рис.4. Диаграмма работы с регистрами Wiznet W5100.
Из диаграммы видно, что после инициализации W5100 открывается
TCP/IP порт 80 и выполняется прослушивание этого порта
для любых клиентских запросов. Эти действия выполняются функцией socket():
// Выбор протокола
SPI_Write(S0_MR,eth_protocol);
// Запись номера порта, в программе 0x8080,
сначала выделяем старший байт и
// смещаем его на 8 разрядов, записывая по адресу S0_PORT(0x0404)
SPI_Write(S0_PORT,((tcp_port & 0xFF00) >> 8
));
// Далее выделяем младший байт и записываем его по адресу 0x0405
SPI_Write(S0_PORT + 1,(tcp_port & 0x00FF));
// Выполняем открытие сокета
SPI_Write(S0_CR,CR_OPEN);
// Ожидаем открытие сокета
while(SPI_Read(S0_CR)); SPI_Read(S0_SR) == SOCK_INIT;
После записи команды CR_OPEN (0x01) в
регистр S0_CR сокета 0, W5100
автоматически очистит этот регистр. Поэтому с помощью цикла while(SPI_Read(S0_CR)) необходимо подождать его очистку. Регистр статуса S0_SR должен
получить значение SOCK_INIT(0x13).
После открытия сокета необходимо выполнить прослушивание 80 порта. Для этого в регистр
команд S0_CR необходимо
отправить команду CR_LISTEN (0x02). Как и в предыдущем случае с помощью цикла while(SPI_Read(S0_CR)) необходимо подождать очистку регистра S0_CR, а
регистр статуса S0_SR должен
получить значение SOCK_LISTEN (0x14):
SPI_Write(S0_CR,CR_LISTEN);
while(SPI_Read(S0_CR)); if (SPI_Read(S0_SR) ==
SOCK_LISTEN)
Эти команды выполняются в функции listen().
После этих действий Wiznet W5100 готов принимать запросы от браузера клиента.
Согласно программе
микроконтроллера, организован бесконечный цикл, в котором постоянно проверяются
запросы со стороны клиента. Проверяется состояние регистра S0_SR. Если его
значение соответствует SOCK_ESTABLISHED (0x17), то
связь с клиентом установлена. Следующим действием является проверка размера
считанных данных RX. Для этого выполняется чтение
регистра S0_RX_RSX в функции recv_size():
uint16_t recv_size(void)
{return ((SPI_Read(S0_RX_RSR) & 0x00FF) << 8
)+SPI_Read(S0_RX_RSR + 1);}
Если полученные данные в буферной памяти RX существуют (recv_size()>0) то
выполняется чтение содержимого буфера
RX памяти, которая реализуется в функции recv().
Однако замечено, что при установлении соединения данные в буферной памяти могут
отсутствовать и это приводит к «зависанию» сервера. В связи с этим в программе
вводится цикл ожидания, и если после его выполнения значение recv_size()
продолжает оставаться равным нулю, после небольшой задержки (0.5 – 1.0 секунды)
инициируется принудительный разрыв соединения.
Перед чтением полученных
буфером данных вначале необходимо рассчитать адрес памяти буфера, с которого
необходимо выполнить чтение данных. Далее, полученные от клиента данные
читаются с этого места. Предполагается, что буфер чтения для сокета 0 имеет
размер 2048Байт (0x800). На рисунке 5 поясняется,
как рассчитывается физический адрес.
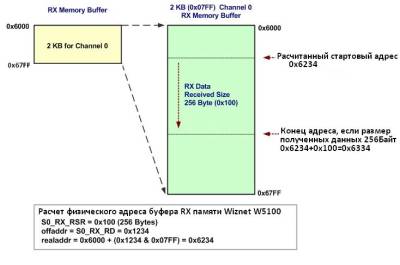
Рис.5. Расчет физического адреса буфера RX памяти.
Для определения физического адреса в буфере приема RX
необходимо считать значение регистра S0_RX_RD и с
помощью битовой операции & наложить на него значение 0x7FF
(размер для чтения буфера приема – 2048Байт нулевого сокета). К полученному
значению добавить 0x6000 – начальный адрес буфера
приема. В функции recv() это делается следующим
образом:
// Чтение данных с регистра S0_RX_RD старшего и младшего байтов
ptr
= SPI_Read(S0_RX_RD);
offaddr =
(((ptr & 0x00FF) << 8 ) + SPI_Read(S0_RX_RD + 1));
// Чтение в цикле полученных данных из буфера RX с
размещением
// их в массиве *buf
while(buflen) {
buflen--;
// Расчет физического адреса
realaddr=RXBUFADDR + (offaddr & RX_BUF_MASK);
*buf =
SPI_Read(realaddr);
offaddr++;
buf++;
}
*buf='\0'; // Формирование конца строки
Окончательно в регистр команд S0_CR пересылается команда CR_RECV (0x40) для
того, чтобы Wiznet W5100 завершил процесс приема:
// Пересылка команды CR_RECV
SPI_Write(S0_CR,CR_RECV);
_delay_us(5);
// Ожидание конца приема
После
изучения запроса клиента, HTTP –
сервер пошлет ответ. Ответ рассматриваемого тут сервера состоит из HTML – текстовых страниц,
изображений и показаний температурного датчика DS18B20. HTML - текст и изображения представлены в виде массивов,
которые размещены в flash памяти микроконтроллера. Часть
текстовых данных размещена в SRAM –
памяти микроконтроллера и копируется в текстовый буфер, как показано ниже:
// Создание HTTP ответа
strcpy((char *)buf,("HTTP/1.0 200 OK\nContent-Type: text/html;
charset=windows-
1251\n\n"));
strcat((char *)buf,("<!DOCTYPE
HTML>\n<html><title>Web-server
ATmega1280+W5100</title><body>\n"));
strcat((char *)buf,("<h1>Сервер на
ATmega1280+W5100</h1>\r\n"));
strcat((char *)buf,("<A href='t.htm'>Температура в помещении </a>"));
После
копирования HTML ответа в буфер (buf), необходимо его содержимое передать клиенту. Это
выполняется с помощью функции send(). До
передачи данных необходимо проверить размер буфера передачи Wiznet W5100
посредством чтения регистра S0_TX_FSR. Его значение должно быть равно 2Кбайт (0x07FF):
// Определение размера буферного регистра передачи
txsize=SPI_Read(SO_TX_FSR);
txsize=(((txsize & 0x00FF) << 8 ) + SPI_Read(SO_TX_FSR +
1));
// Если размер его меньше, чем количество поступивших данных(buflen)
// то необходимо обождать хотя бы 1000мс, пока он не освободиться
timeout=0;
while
(txsize < buflen) {
_delay_ms(1);
txsize=SPI_Read(SO_TX_FSR);
txsize=(((txsize & 0x00FF) << 8 ) + SPI_Read(SO_TX_FSR + 1));
if (timeout++ > 1000) {
// Если буфер не освободиться, то принудительно прервать соединение
disconnect(sock);
} }
Как в случае приема данных, необходимо рассчитать физический адрес в буфере
TX, начиная с которого будут записываться туда
передаваемые данные (см. рисунок 6):
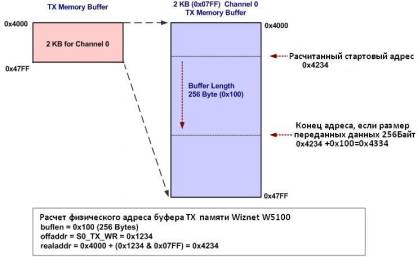
Рис.6. Расчет физического адреса буфера TX
Для определения физического адреса в буфере передачи TX необходимо считать значение регистра S0_TX_TD и битовой операцией & наложить на него 0x7FF (размер
буфера передачи – 2048 Байт нулевого сокета). К полученному значению добавить 0x4000 – начальный адрес буфера передачи. В функции send() это делается так:
// Чтение данных с регистра S0_TX_TD
старшего и младшего байтов
ptr
= SPI_Read(S0_TX_WR);
offaddr =
(((ptr & 0x00FF) << 8 ) + SPI_Read(S0_TX_WR + 1));
// Запись в цикле переданных данных в буфер TX из
массива *buf
while(buflen)
{
buflen--;
// Расчет
физического адреса
realaddr
= TXBUFADDR + (offaddr & TX_BUF_MASK);
// Копирование данных в TX буфер W5100
SPI_Write(realaddr,*buf);
offaddr++; buf++;}
После получения всех данных буфером TX памяти
необходимо последний указатель записать обратно в регистр S0_TX_WR, чтобы
с этого места помещать следующую порцию данных:
SPI_Write(S0_TX_WR,(offaddr & 0xFF00) >> 8
);
SPI_Write(S0_TX_WR + 1,(offaddr & 0x00FF));
Далее необходимо записать в регистр S0_CR команду CR_SEND (0x20),
которая отправит данные в сеть из буфера.
SPI_Write(S0_CR,CR_SEND);
В соответствии с требованием протокола HTTP, после отправки HTML ответа
клиенту, необходимо отключить и закрыть соединение с клиентом. Это выполняется
с помощью функций disconnect() и close() соответственно:
// Посылка команды Disconnect
SPI_Write(S0_CR,CR_DISCON);
// Посылка команды Close
SPI_Write(S0_CR,CR_CLOSE);
В программе main() выполняется бесконечный цикл
открытия и прослушивания нового запроса, который идет от клиента к серверу.
Ранее отмечалось, что
рассмотренная программа, за основу которой взят код из источника [1] обладает
недостатком - при подключении к серверу через Интернет сервер через короткий
промежуток времени «виснет». Для выявления проблемы в разных участках программы
выполнялась распечатка проходящих данных. Было обнаружено, что некоторые
браузеры при работе с сервером через
Интернет выполняют установление соединения при посылке нулевых запросов. Это приводит
к зацикливанию сервера. На рисунке 7 показана распечатка нулевых длин запросов
со стороны клиента в части программы, которая соответствует установленному
соединению.
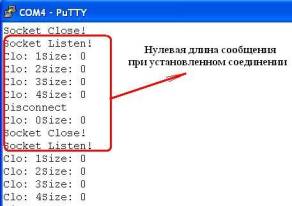
Рис.7. Распечатка нулевой длины запроса от браузера.
Для выхода из зацикливания в программе main() был
установлен счетчик clo(см. текст программы). Если
значение clo при нулевой длине сообщения,
вычисленной функцией recv_size() устанавливалось более 5, то вызывалась функция disconnect() для разрыва соединения через экспериментально
подобранную задержку.
3.Использование Flash памяти
микроконтроллера для размещения текста и изображений.
Рассмотрим возможность размещения html – страниц во всей flash
памяти микроконтроллера ATmega1280, используя контроллер Arduino mega и среду
разработки AVR Studio 4 с компилятором WinAVR. Особенностью ATmega1280,
ATmega2560 является то, что они 8-ми разрядные, поэтому при их программировании
возникают сложности адресации к памяти за пределами 64Кбайт. Тем более не все
компиляторы поддерживают обращение к памяти за область 64Кбайт. Для
микроконтроллеров ATmega32, ATmega644 и др. аналогичных таких проблем не
существует, т.к. их flash память не выходит за пределы
64Кбайт.
Размещение данных в flash памяти выполняется с помощью библиотеки AVR libc. Для
подключения библиотеки необходимо в начале программы ее описать с помощью #include <avr/pgmspace.h>. HTML документ (текст и изображения) в программе должны быть
представлены в виде массива байт, которые можно получить, например помощью
программы makefsdata.exe[4]. Для
размещения массива байт в flash из файла pgmspace.h можно воспользоваться следующими описаниями:
#define
pgm_read_byte(address_short) pgm_read_byte_near(address_short)
#define
pgm_read_byte_near(address_short)
__LPM((uint16_t)(address_short))
- читает байт с flash памяти
коротким адресом в проеделах 64КБайт
#define
pgm_read_byte_far(address_long)
__ELPM((uint32_t)(address_long))
- читает байт с flash памяти
“дальним” адресом за пределами
64КБайт
#define __LPM(addr) __LPM_classic__(addr)
#define __ELPM(addr) __ELPM_classic__(addr)
Здесь __LPM_classic__(addr) –
макрос, который предназначен для чтения байта с памяти программ, используя 16-и
битный адрес (т.е. в пределах 64КБайт). Он выглядит следующим образом:
#define
__LPM_classic__(addr)
(__extension__({ \
uint16_t __addr16 = (uint16_t)(addr); \
uint8_t __result; \
__asm__ \
( \
"lpm"
"\n\t" \
"mov %0, r0"
"\n\t" \
: "=r"
(__result) \
: "z" (__addr16) \
: "r0" \
); \
__result;
\
}))
__ELPM_classic__(addr) – макрос,
который предназначен для чтения байта с памяти программ, используя 32-х битный
адрес (т.е. за пределами 64КБайт). Он записан следующим образом:
#define
__ELPM_classic__(addr)
(__extension__({ \
uint32_t __addr32 = (uint32_t)(addr); \
uint8_t __result; \
__asm__ \
( \
"out %2, %C1"
"\n\t" \
"mov r31, %B1"
"\n\t" \
"mov r30, %A1"
"\n\t" \
"elpm"
"\n\t" \
"mov %0, r0"
"\n\t" \
: "=r"
(__result) \
: "r"
(__addr32), \
"I"
(_SFR_IO_ADDR(RAMPZ)) \
: "r0", "r30", "r31" \
); \
__result; \
}))
В файле pgmspace.h, который включен в компилятор WinAVR модификации
2010-01-20, нет макроса для вычисления 32-х битного “дальнего” адреса (за
пределами 64КБайт). Это может выполнить следующий макрос[5], который должен
быть вставлен в программу сервера:
#define FAR(var)
\
({ uint_farptr_t tmp;
\
__asm__ ( \
"ldi %A0, lo8(%1)" "\n\t" \
"ldi %B0, hi8(%1)" "\n\t" \
"ldi %C0, hh8(%1)" \
: "=d"
(tmp) \
: "i" (&(var))); \
tmp; \
})
При компиляции необходимо указать компоновщику, в каких
сегментах необходимо разместить массивы данных. Для этого описываются сегменты в части flash памяти, где
расположен код программы и следующий
64-х килобайтный блок:
byte tex[]
__attribute__((section(".my_section"))) =
{0x3c,0x68,0x74,0x6d,0x6c,0x20,0x78,0x6d,0x6c,0x6e,0x73,0x3a,0x6f,…};
byte pic[]
__attribute__((section(".far_section"))) =
{0x89,0x50,0x4e,0x47,0x0d,0x0a,0x1a,0x0a,0x00,0x00,0x00,0x0d,0x49,…};
Впоследствии при компоновке необходимо воспользоваться опциями:
-Wl,--section-start=.my_section=0x2600 -Wl,--section-start=.far_section=0x10000
Секция .my_section будет
располагать массив tex[] с начального адреса 0x2600, который должен следовать
за кодом программы. Секция .far_section будет располагать массив pic[]
с начального адреса 0x10000 в следующем блоке размером 64Кбайт. Опции
устанавливаются, если в среде Atmel AVR Studio 4 перейти по ссылкам:
Project -> Configuration Options -> Custom
Options -> [Linker Options]
Для прошивки микроконтроллера на плате Arduino mega
используется программатор avrdude со
своим конфигурационным файлом, которые
заимствованы с программной среды Arduino:
avrdude -C avrdude.conf -patmega1280 -carduino -PCOM5 -b57400 -D -V -Uflash:w:w5100_mega.hex:i
В микроконтроллере atmega1280 должен быть bootloader (стандартный загрузчик для Arduino).
Как уже отмечалось, полный текст программы представлен в источнике[3].
Замеченные недостатки:
1.Из-за простоты сервера не желательно на одной html страничке размещать более одного изображения. На остальные изображения можно делать ссылки. Это связано с тем, что
сервер может обслуживать только последовательные запросы со стороны браузера. Если выполняются параллельные
запросы (быстрые браузеры), то все изображения на страничке просто не
загружаются. Хорошо работают с этим сервером при наличии картинок браузеры Opera, Firefox. Плохо
- Chrome, Яндех - браузер, Internet Explorer. Если любой браузер подключен
через прокси - сервер (Squid),
изображения на страничке загружаются.
2.При неудовлетворительном качестве Интернет-соединения при загрузке объемных страничек сервер часто
сбрасывается. Поэтому html - странички
должны быть небольшие.
Основным достоинством сервера является стабильность его работы (не виснет),
относительная простота программы на Си. Код программы без данных занимает
примерно 2.5-3.0 Кбайт.
Литература.
1.
R.W. Besinga. Integrating Wiznet W5100, WIZ811MJ network module with Atmel AVR
Microcontroller. [Electronic resource]. -
Mode of access:
http://www.ermicro.com/blog/?p=1773, 2010.
2. Arduino. Официальный сайт. [Electronic resource]. - Mode
of access: http://arduino.cc , 2014.
3. Мясищев А.А. Сервер на
ATmega1280 + Wiznet W5100. Практика для студентов. [Electronic resource]. - Mode
of access:
http://webstm32.sytes.net/mega_t.html, 2014.
4. Мясищев А.А. Web – сервер на платах STM32F4Discovery и STM32F4DIS-BB для удаленного управления по TCP/IP сети. [Electronic resource].
- Mode of access:
http://alex56ma.zapto.org/stm32_web/stm32_3.html, 2014.
5. AVR-GCC-Tutorial.
[Electronic resource]. - Mode of
access: http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial#Programmspeicher_.28Flash.29.
2010.