Математика/Математическое моделирование
Аспирант
ПензГТУ Мокроусов Д.А., студент ПГУ Демин Е.С.,
к.т.н. Карпухин Э.В., д.т.н. Демин С.Б.
Пензенский государственный технологический университет (ПензГТУ)
Пензенский государственный университет (ПГУ)
Математическое моделирование магнитных полей НМПУ для возбуждения
ультразвуковых волн кручения
Аннотация: Проведен анализ математических моделей магнитных полей
постоянного магнита методом эквивалентного соленоида. Предложена методика
определения максимально возможного удаления звукопровода накладных
магнитострикционных преобразователей уровня (НМПУ) для байпасных систем по
радиальной оси магнита и расчета его геометрических размеров.
Ключевые
слова: методика моделирования,
магнитострикционные преобразователи уровня
I Введение. Сегодня в химической, пищевой и нефтегазовой отраслях
промышленности для измерения и контроля рабочих жидких сред применяются
уровнемеры, использующие различные физические эффекты и отличающиеся
разнообразием технических решений и характеристик [1, 2]. Автоматизация
технологических процессов предприятий отраслей требует совершенствования
имеющихся и создание более эффективных уровнемеров. В последние годы находят
применение ультразвуковые магнитострикционные преобразователи уровня (МПУ), имеющие
высокие метрологические и технические характеристики и относительно низкую
стоимость [3]. Для развития и совершенствования этого класса измерительных приборов
необходимы всесторонние исследования, включая и теоретические на основе метода
математического моделирования.
II Постановка задачи. На основе метода моделирования провести анализ известных
математических моделей магнитных полей постоянного магнита (соленоида) с целью
выбора наиболее адекватной модели поля, на основе которой разработать методику расчета
геометрических параметров магнита для НМПУ с U-образным акустическим трактом байпасных измерительных
систем для устойчивого возбуждения ультразвуковые волны (УЗВ) кручения на
заданных расстояниях от радиальной поверхности магнита.
III Результаты. Для возбуждения в среде U-образного звукопровода НМПУ из магнитострикционного
материала с выбранными характеристиками (электрическими, магнитными,
магнитострикционными) волн кручения необходимо иметь два источника магнитного
поля.
Одним таким источником является проводящий
магнитострикционный U-образный звукопровод НМПУ, через который пропускают
токовые импульсы записи длительности ![]() с интервалом
с интервалом ![]() [3]:
[3]:

где ![]() амплитудное значение,
амплитудное значение, ![]() напряжение источника питания усилителя
записи, прикладываемое к звукопроводу,
напряжение источника питания усилителя
записи, прикладываемое к звукопроводу, ![]() его площадь поперечного сечения, удельное
сопротивление и полная длина соответственно,
его площадь поперечного сечения, удельное
сопротивление и полная длина соответственно, ![]() число гармоник,
число гармоник, ![]() текущее время.
текущее время.
Вокруг звукопровода с током ![]() формируется импульсное магнитное поле, напряженность
которого описывается известным выражением [4]:
формируется импульсное магнитное поле, напряженность
которого описывается известным выражением [4]:
![]() (1)
(1)
где ![]() расстояние от поверхности проводящего
звукопровода. Направление силовых магнитных линий этого поля определяется
правилом правого винта (буравчика).
расстояние от поверхности проводящего
звукопровода. Направление силовых магнитных линий этого поля определяется
правилом правого винта (буравчика).
Другим источником стационарного магнитного
поля выступает постоянный магнит НМПУ, который закрепляется на поплавковом
элементе и размещается в полости байпасной камеры измерительной системы технического
объекта (ТО). Корпус байпасной камеры обычно изготавливается радиальным, реже –
в виде квадратной трубы. В нашем случае материалом для изготовления корпуса
байпасной камеры должен служить немагнитный материал, например, нержавеющая
сталь.
Для обеспечения плавучести поплавковой
системы (поплавок+магнит) в жидкой среде байпасной камеры ТО должно выполняться
условие [4]:
![]()
где ![]() сила выталкивания,
сила выталкивания, ![]() вытесненный
поплавком объем жидкой среды ТО плотностью
вытесненный
поплавком объем жидкой среды ТО плотностью![]() ,
,
![]() ускорение свободного падения,
ускорение свободного падения, ![]() полный вес поплавковой системы с учетом неучтенных
масс
полный вес поплавковой системы с учетом неучтенных
масс ![]() (весов), форма постоянного магнита выбирается
радиальной, а именно, в форме кольца с типовым размером.
(весов), форма постоянного магнита выбирается
радиальной, а именно, в форме кольца с типовым размером.
Такой радиальный магнит создает продольное
стационарное магнитное поле напряженностью ![]() ,
которое примерно в
,
которое примерно в ![]() раз больше внутри, чем вне его геометрических
размеров – толщины
раз больше внутри, чем вне его геометрических
размеров – толщины ![]() и диаметра
и диаметра ![]() .
В нашем случае интерес составляет оценка значения напряженности внешнего магнитного
поля кольцевого магнита в области расположения ветвей 1, 2 U-образного
звукопровода НМПУ, при которых возможно уверенное возбуждение УЗВ кручения с
заданным отношением сигнал/шум вдоль всего диапазона измерения уровня
.
В нашем случае интерес составляет оценка значения напряженности внешнего магнитного
поля кольцевого магнита в области расположения ветвей 1, 2 U-образного
звукопровода НМПУ, при которых возможно уверенное возбуждение УЗВ кручения с
заданным отношением сигнал/шум вдоль всего диапазона измерения уровня ![]() .
Это возможно выполнить с использованием соответствующей математической модели
постоянного магнита кольцевой формы и метода моделирования, взяв за основу
расчетную схему НМПУ байпасной системы, приведенной на рисунке 1.
.
Это возможно выполнить с использованием соответствующей математической модели
постоянного магнита кольцевой формы и метода моделирования, взяв за основу
расчетную схему НМПУ байпасной системы, приведенной на рисунке 1.
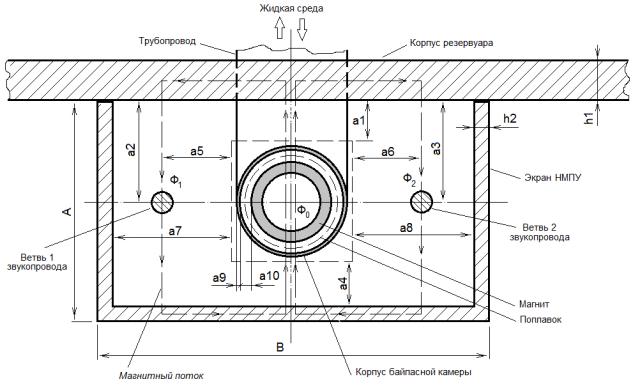
Рисунок 1 – Расчетная схема байпасной системы с НМПУ
Такая математическая модель кольцевого или
цилиндрического магнита должна позволять с достаточной точностью рассчитывать
значение напряженности поля вне магнита в заданной точке пространства (![]() )
акустического тракта НМПУ, исходя из следующих условий:
)
акустического тракта НМПУ, исходя из следующих условий:
– из практики создания МПУ известны
граничные значения напряженности результирующего поля, при которых возможно
возбуждение УЗВ кручения требуемой амплитуды;
– радиальный магнит
намагничен равномерно и его намагниченность не изменяется;
– влиянием внешних магнитных полей можно
пренебречь (экранирование);
– корпус байпасной
камеры ТО выполнен из немагнитного материала, а влияние стенки (корпуса)
резервуара не значительное.
В результате взаимодействия двух полей ![]() и
и ![]() источников поля в зонах расположения магнита
поплавкового элемента по оси U-образного звуко-провода, на его поверхностях образуются
торсионные (результирующие) поля напряженностью соответственно [3]:
источников поля в зонах расположения магнита
поплавкового элемента по оси U-образного звуко-провода, на его поверхностях образуются
торсионные (результирующие) поля напряженностью соответственно [3]:
![]() (2)
(2)
![]() (3)
(3)
где напряженности (2), (3) поля магнита в пространстве
расположения ветвей 1, 2 звукопровода, являются источниками формирования УЗВ
кручения.
Для моделирования магнитных полей
постоянных магнитов радиальной формы применяют метод эквивалентного соленоида,
который позволяет с достаточной точностью вычислить требуемые параметры в
заданной точке пространства. При этом, делают допущение на однородность
намагниченности моделируемого магнита и плотность намотки эквивалентного соленоида.
Из анализов источников информации, автору
известны ряд математических моделей магнитных полей соленоидов [5-10], которые
предположительно могут быть использованы для нашего случая. Проанализируем
известные модели полей.
В [9] предлагается моделировать постоянные
магниты, когда их намагниченность ![]() априори известна, следующим выражением:
априори известна, следующим выражением:
 (4)
(4)
здесь ![]() напряженность магнитного поля в точке
напряженность магнитного поля в точке ![]() от постоянного
магнита,
от постоянного
магнита, ![]() намагниченность в точке
намагниченность в точке ![]() ,
,
![]() вектор, направленный из точки
вектор, направленный из точки ![]() в точку
в точку ![]() ,
, ![]() объем постоянного магнита.
объем постоянного магнита.
При ![]() когда имеет место однородная намагниченность
по всему объему
когда имеет место однородная намагниченность
по всему объему ![]() постоянного магнита, его поле (4) можно
вычислить по известному выражению:
постоянного магнита, его поле (4) можно
вычислить по известному выражению:
 (5)
(5)
где ![]() вектор внешней нормали, и интеграл
вычисляется по поверхности постоянного магнита, имеющего площадь
вектор внешней нормали, и интеграл
вычисляется по поверхности постоянного магнита, имеющего площадь ![]() .
.
Вычисления напряженности ![]() поля постоянного магнита по формулам (4), (5)
сопряжены с трудностями определения объемного (4) или поверхностного (5)
интегралов. Объем численных вычислений чрезвычайно большой, требует больших
временных затрат при относительно не высокой точности. А поэтому, данные модели
не будем использовать для моделирования НМПУ на волнах кручения со сложной
геометрией акустического тракта.
поля постоянного магнита по формулам (4), (5)
сопряжены с трудностями определения объемного (4) или поверхностного (5)
интегралов. Объем численных вычислений чрезвычайно большой, требует больших
временных затрат при относительно не высокой точности. А поэтому, данные модели
не будем использовать для моделирования НМПУ на волнах кручения со сложной
геометрией акустического тракта.
В [5,7] приводится математическая модель
поля магнита длиной ![]() и диаметром
и диаметром ![]() с равномерной намагниченностью
с равномерной намагниченностью ![]() для вычислений по методу эквивалентного соленоида
с током
для вычислений по методу эквивалентного соленоида
с током ![]() и числом витков
и числом витков ![]() :
:
а) для индукции:
 (6)
(6)
б) для напряженности:
 (7)
(7)
где ![]() магнитная постоянная,
магнитная постоянная, ![]() магнитная проницаемость воздуха,
магнитная проницаемость воздуха, ![]() расстояние до расчетной точки
расстояние до расчетной точки ![]() по радиальной координате
по радиальной координате ![]() .
.
Выражения (6), (7) позволяют вычислить
параметры магнитного поля на поверхности ветвей 1, 2 U-образного
звукопровода НМПУ, расположенных на расстояниях ![]() и
и ![]() от радиальной поверхности постоянного магнита
(см. рис. 1) и определить, тем самым, возможность возбуждения в его среде УЗВ
кручения согласно (2), (3).
от радиальной поверхности постоянного магнита
(см. рис. 1) и определить, тем самым, возможность возбуждения в его среде УЗВ
кручения согласно (2), (3).
Напряженность ![]() магнитного поля плавно изменяется в диапазоне
магнитного поля плавно изменяется в диапазоне
![]() по мере отдаления от радиальной поверхности
эквивалентного соленоида (магнита), что соответствует реальности (метод железных
опилок).
по мере отдаления от радиальной поверхности
эквивалентного соленоида (магнита), что соответствует реальности (метод железных
опилок).
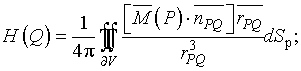
В другом источнике [10] рассматривается
одновитковый соленоид радиусом ![]() ,
расположенным в цилиндрической системе координат с параметрами
,
расположенным в цилиндрической системе координат с параметрами ![]() ,
через которую протекает постоянный ток
,
через которую протекает постоянный ток ![]() (рис.2,а).
Он создает магнитное поле, напряженность которого в произвольной точке
(рис.2,а).
Он создает магнитное поле, напряженность которого в произвольной точке ![]() от его оси предлагается вычислять в
соответствии с выражением:
от его оси предлагается вычислять в
соответствии с выражением:
 (8)
(8)
где ![]() расстояние от плоскости витка.
расстояние от плоскости витка.
а) б)
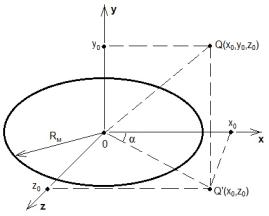
Рисунок 2 – Расчетная схема постоянного магнита
по методу эквивалентного соленоида
Приведенное выражение (8) положено в
основу для вывода формулы по вычислению напряженности поля постоянного магнита
с использованием метода эквивалентного соленоида. В этом случае радиальный
магнит представляется как многослойный соленоид (рис. 2,б) со средним радиусом ![]() ,
где
,
где ![]() внутренний и внешний радиусы, и толщиной
внутренний и внешний радиусы, и толщиной ![]() ,
через которую протекает постоянный ток
,
через которую протекает постоянный ток ![]() .
.
Предлагается описывать напряженность
магнитного поля такого постоянного магнита (многослойного соленоида) в
произвольной пространственной точке ![]() следующим выражением, полученным из (8) путем
интегрирования функции по декартовым координатам:
следующим выражением, полученным из (8) путем
интегрирования функции по декартовым координатам:
 (9)
(9)
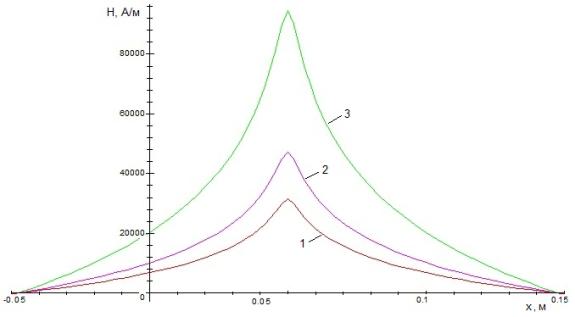
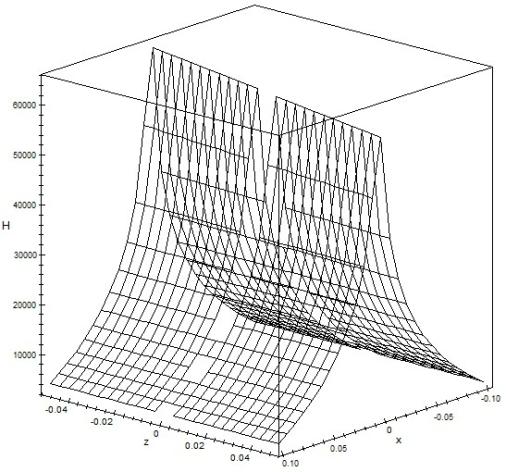
Результаты моделирования выражений (8) и (9)
получены практически при тех же исходных данных (рис.3), что и для выражений (6),
(7). Характерным здесь является достаточно резкое изменение значений напряженности
![]() по мере удаления от центра соленоида
(магнита), которое остается без изменения в пределах его толщины
по мере удаления от центра соленоида
(магнита), которое остается без изменения в пределах его толщины ![]() (см. рис. 3,б). Это несколько отличает от
реальной картины распределения магнитной энергии кольцевого (радиального)
магнита. В отличие от модели (7), данная модель (9) формирует более высокие
значения параметра
(см. рис. 3,б). Это несколько отличает от
реальной картины распределения магнитной энергии кольцевого (радиального)
магнита. В отличие от модели (7), данная модель (9) формирует более высокие
значения параметра ![]() при практически одинаковых исходных
значениях. Спад кривой
при практически одинаковых исходных
значениях. Спад кривой ![]() более крутой при вершине, и более пологий у основания.
более крутой при вершине, и более пологий у основания.
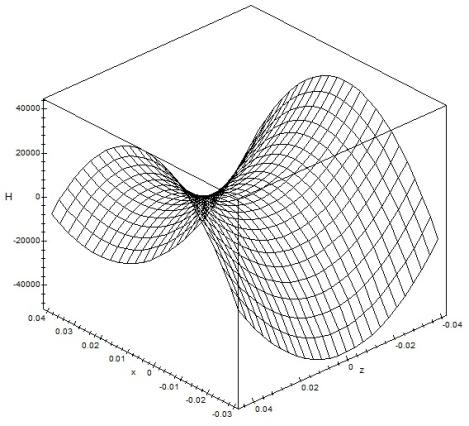
В источнике [8] напряженность поля
многослойного соленоида с числом витков W, через который протекает ток ![]() ,
описывается в виде степенного ряда по координатам
,
описывается в виде степенного ряда по координатам ![]() и
и ![]() с погрешностью не более
с погрешностью не более ![]() :
:
 (10)
(10)
а)
б)
Рисунок 3 – Напряженность поля многослойного соленоида (а)
в точке ![]() при
токах: 1 –
при
токах: 1 – ![]() 2 –
2 – ![]()
3 – ![]() ,
и его трехмерное изображение (б)
,
и его трехмерное изображение (б)
здесь ![]() расстояние расчетной точки
расстояние расчетной точки ![]() до геометрического центра соленоида,
до геометрического центра соленоида, ![]() корректирующий коэффициент.
корректирующий коэффициент.
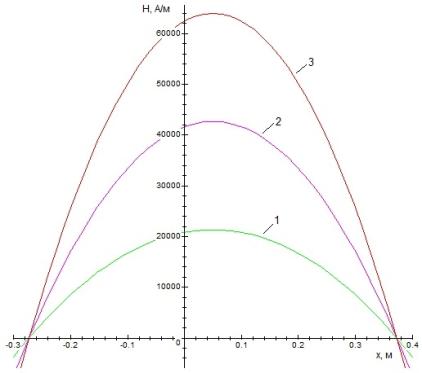
На рисунке 4 приведены результаты
моделирования выражения (10). Напряженность поля с удалением расчетной точки ![]() уменьшается плавно. Плавность изменения
напряженности наблюдается и вдоль координаты
уменьшается плавно. Плавность изменения
напряженности наблюдается и вдоль координаты ![]() .
Такие изменения параметров магнитного поля соответствует действительности.
Поэтому данную математическую модель будем использовать для вычисления
результирующего магнитного поля на поверхностях ветвей 1, 2 U-образного
звукопровода НМПУ в зонах преобразования сигналов (см. рис. 1), представив
выражения (2) и (3) в виде:
.
Такие изменения параметров магнитного поля соответствует действительности.
Поэтому данную математическую модель будем использовать для вычисления
результирующего магнитного поля на поверхностях ветвей 1, 2 U-образного
звукопровода НМПУ в зонах преобразования сигналов (см. рис. 1), представив
выражения (2) и (3) в виде:
![]() (11)
(11)
![]() (12)
(12)
где ![]() напряженности магнитного поля магнита на
поверхностях ветвей 1, 2 U-образного звукопровода по радиальной координате
напряженности магнитного поля магнита на
поверхностях ветвей 1, 2 U-образного звукопровода по радиальной координате ![]() ,
расположенных на расстояниях соответственно
,
расположенных на расстояниях соответственно ![]() и
и ![]() .Эта
же математическая модель (10) будет положена в основу разработки методики по
вычислению геометрических параметров радиального магнита, при котором возможно
устойчивое возбуждение в среде U-образного звукопровода НМПУ УЗВ кручения.
.Эта
же математическая модель (10) будет положена в основу разработки методики по
вычислению геометрических параметров радиального магнита, при котором возможно
устойчивое возбуждение в среде U-образного звукопровода НМПУ УЗВ кручения.
Для проверки правильности суждения о
распределении энергии магнитного поля кольцевого магнита область возбуждения
УЗВ кручения НМПУ по расчетной схеме рис. 1 была промоделирована в программе ELCUT v.7.8 с аналогичными исходными данными энергии
магнитного поля.
На рисунке 5 представлены результаты
моделирования, где видно, что плотность магнитной энергии магнита плавно
уменьшается по радиусу с удалением от геометрического центра измерительной
системы, т.е. картина поля вполне реальная.
а)
б)
Рисунок 4 – Напряженность поля многослойного соленоида (а)
в расчетной точке ![]() при
токах: 1 –
при
токах: 1 – ![]() 2 –
2 – ![]()
2 – ![]() ,
и его трехмерное изображение (б)
,
и его трехмерное изображение (б)
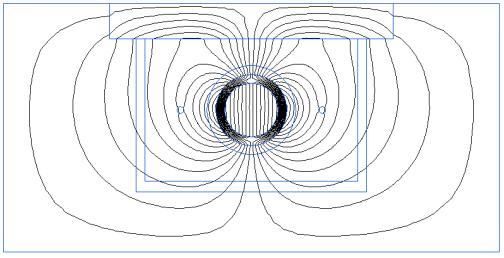
а)
без интерполяции по плотности магнитной
энергии
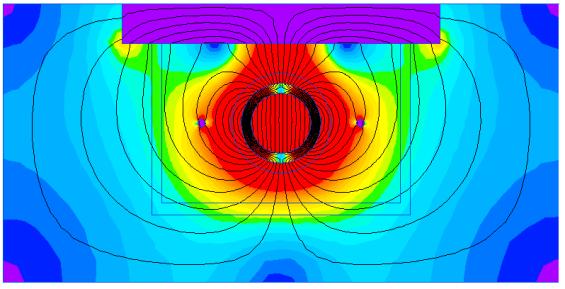
б)
с интерполяцией по плотности магнитной
энергии
Рисунок 5 – Визуализация осевой магнитной энергии кольцевого
постоянного магнита НМПУ байпасной системы
Определим допустимое удаление ![]() ветвей 1, 2 U-образного звукопровода НМПУ от радиальной поверхности
кольцевого магнита (см. рис.2,б), где его магнитная энергия
ветвей 1, 2 U-образного звукопровода НМПУ от радиальной поверхности
кольцевого магнита (см. рис.2,б), где его магнитная энергия ![]() [7] будет достаточна для возбуждения УЗВ
кручения во всем диапазоне преобразования уровня
[7] будет достаточна для возбуждения УЗВ
кручения во всем диапазоне преобразования уровня ![]() .
.
Для этого предлагается следующая методика
определения максимально возможного удаления звукопровода по радиальной оси
магнита (рис.6), основываясь на результатах проведенного в работе моделирования
и работах других авторов [3-10]. При этом полагаем, что поле магнита однородное
и не искажено внешними магнитными полями, ферромагнитными массами и экранами.
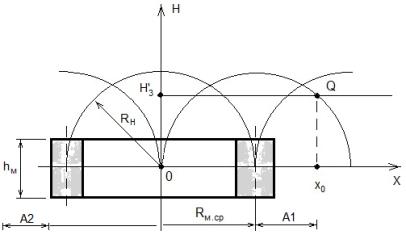
Рисунок 6 – Расчетная схема распределения
магнитной энергии идеализированного магнита
Суть данной методики следующая. Исходя из
геометрических размеров кольцевого (радиального) магнита ![]() ,
из его геометрического центра
,
из его геометрического центра ![]() проводится радиус-вектор усредненной
напряженности поля по ряду известных магнитных материалов [7], равный
проводится радиус-вектор усредненной
напряженности поля по ряду известных магнитных материалов [7], равный ![]() .
Его пересечение с прямой заданного (допустимого) значения напряженности поля
.
Его пересечение с прямой заданного (допустимого) значения напряженности поля ![]() (11), (12) дает точку
(11), (12) дает точку ![]() ,
координата
,
координата ![]() которой определяет удаление звукопровода НМПУ
от магнита, соответственно равное
которой определяет удаление звукопровода НМПУ
от магнита, соответственно равное ![]() и
и ![]() см. рис. 1.
см. рис. 1.
Если размеры ![]() заданы технологически, то размеры
заданы технологически, то размеры ![]() и
и ![]() показывают удаление ветвей 1, 2 U-образного
звукопровода НМПУ от корпуса байпасной камеры, и могут изменяться при его
размещении на технологическом объекте. Из расчетной схемы рис. 6 видно, что магнитная
энергия магнита максимальна в его геометрическом центре
показывают удаление ветвей 1, 2 U-образного
звукопровода НМПУ от корпуса байпасной камеры, и могут изменяться при его
размещении на технологическом объекте. Из расчетной схемы рис. 6 видно, что магнитная
энергия магнита максимальна в его геометрическом центре ![]() ,
а также по его радиальной симметрии, определяемой параметром
,
а также по его радиальной симметрии, определяемой параметром ![]() .
Следовательно, значения
.
Следовательно, значения ![]() и
и ![]() должны быть минимально допустимыми исходя из
конструкции акустического тракта НМПУ, например
должны быть минимально допустимыми исходя из
конструкции акустического тракта НМПУ, например ![]() .
.
Далее, зная требуемую энергию ![]() радиального магнита (10), плотность его
материала, диаметр
радиального магнита (10), плотность его
материала, диаметр ![]() байпасной камеры, можно определить его геометрические
размеры и предельный вес.
байпасной камеры, можно определить его геометрические
размеры и предельный вес.
Зная величину требуемой магнитной энергии
радиального (кольцевого) магнита НМПУ, при которой возможно возбуждение УЗВ
кручения, определяемая как [7] (см. рис. 2,б):
![]() (13)
(13)
где ![]() объем магнита,
объем магнита, ![]() его площадь и толщина,
его площадь и толщина, ![]() напряженность поля постоянного магнита,
вычисляемая из выражения (10),
напряженность поля постоянного магнита,
вычисляемая из выражения (10), ![]() индукция магнитного поля магнита, и задаваясь
значением поперечного размера
индукция магнитного поля магнита, и задаваясь
значением поперечного размера ![]() байпасной камеры ТО, можно найти размер
кольцевого магнита (см. рис. 2):
байпасной камеры ТО, можно найти размер
кольцевого магнита (см. рис. 2):
![]()
Выбрав значение внутреннего размера ![]() магнита для его типоразмера
магнита для его типоразмера ![]() ,
найдем его объем:
,
найдем его объем:
![]() (14)
(14)
Подставив (14) в (13) и решив его
относительно ![]() ,
получим:
,
получим:
 (15)
(15)
где ![]() намагниченность магнита,
намагниченность магнита, ![]() его расчетная толщина по методу эквивалентного
соленоида.
его расчетная толщина по методу эквивалентного
соленоида.
По расчетным данным (15) выбирается
окончательное значение параметра ![]() ,
например, из выпускаемых типоразмеров неодимовых магнитов.
,
например, из выпускаемых типоразмеров неодимовых магнитов.
Уточнив объем магнита (14), его вес в
воздушной среде составит:
![]()
где ![]() удельная плотность материала магнита, что
позволяет определить условия, при которых поплавок с магнитом будут плавать на
поверхности жидкой среды плотностью
удельная плотность материала магнита, что
позволяет определить условия, при которых поплавок с магнитом будут плавать на
поверхности жидкой среды плотностью ![]() в байпасной камере ТО:
в байпасной камере ТО:
где ![]() вес поплавка и неучтенные веса поплавковой системы НМПУ.
вес поплавка и неучтенные веса поплавковой системы НМПУ.
IV Выводы. Выбранная математическая
модель постоянного магнита радиальной формы НМПУ байпасной системы и
предложенная методика расчета геометрии магнита позволяют с высокой
достоверностью проводить математическое исследование системы «магнит-
звукопровод» с целью оптимизации их параметров при разных условиях работы и
конструктивных особенностях байпасной камеры технического объекта.
ЛИТЕРАТУРА:
1.
Бриндли
К. Измерительные преобразователи.
Справочное пособие. Пер. с англ. Под ред. Е.И. Сычева. – М.: Энергоатомиздат,
1991. – 144 с.
2.
Кулаков
М.В. Технические измерения для химических производств. – М.: Альянс, 2008. –
424 с.
3.
Демин С.Б.
Магнитострикционные системы для автоматизации технологического оборудования:
Монография. – Пенза, Изд-во ПГУ, 2002. – 182 с.
4.
Кухлинг, Х. Справочник по физике: Пер. с нем./ Под
ред. Е.М. Лейкина. – М.: Мир, 1983. – 520 с.
5.
Бессонов, Л.А. Теоретические основы электротехники.
Электромагнитное поле. – М.: Высшая школа, 1978. – 231 с.
6.
Арнольд Р.Р. Расчет и
проектирование магнитных систем с постоянными магнитами. – М.: Энергия, 1969. –
184 с.
7.
Постоянные
магниты: Справочник/ А.Б.Альтман, А.Н.Герберг, П.А.Гла-дышев и др.; под ред.
Ю.М.Пятина. – М.: Энергия, 1980. – 488 с.
8.
Чернышев Е.Т. Магнитные измерения
/Е.Т.Чернышев, Е.Н.Чечурина, Н.Г.Чернышева, Н.В.Студенцов. – М.: Изд-во
Комитета Стандартов, мер и изме-рительных приборов при Совете Министров СССР,
1969. – 248 с.
9.
Печенков
А.Н. Расчет трехмерного магнитного поля круглой катушки с прямоугольным
сечением и постоянным током// Дефектоскопия. – 2006. – №9. – С.65-71.
10.
Монтгомери
Д. Получение сильных магнитных полей с помощью соленоидов. – М.: Мир, 1971. –
284 с.