Математика/Математическое моделирование
Аспирант
ПензГТУ Мокроусов Д.А., студент ПГУ Демин Е.С.,
к.т.н. Карпухин Э.В., д.т.н. Демин С.Б.
Пензенский государственный технологический университет (ПензГТУ)
Пензенский государственный университет (ПГУ)
Методика моделирования накладных МПУ
на
волнах кручения со сложным акустическим трактом
Аннотация: Предлагается методика моделирования и концептуальная
математическая модель магнитострикционных преобразователей уровня (МПУ)
накладного типа для байпасных систем
Ключевые
слова: методика моделирования,
магнитострикционные преобразователи уровня
I Введение. В настоящее время во многих отраслях промышленности, таких,
как нефтегазовая, химическая, пищевая, применяются уровнемеры, выполненные на
разных физических принципах [1,2]. Большое разнообразие рабочих сред
технологических объектов и технических условий эксплуатации уровнемеров
являются определяющими факторами в выборе метода измерения уровня и типа
прибора для достижения требуемых технических и эксплуатационных показателей.
Одним из перспективным направлением в уровнеметрии является создание
ультразвуковых МПУ, которые обладают высокими метрологическими характеристиками
и относительно не высокой себестоимостью изготовления. Это относительно новый
вид измерительных приборов. И для его создания требуется проведения всесторонних
исследований, включая и математические исследования. В данной работе сделана
попытка разработать методику моделирования такого прибора (НМПУ) под решение
конкретной технической задачи.
II Постановка задачи. Требуется разработать методику моделирования накладных
МПУ (НМПУ) со сложным акустическим трактом, предназначенных для использования в
байпасных измерительных системах
III Результаты. Для разработки методики моделирования и составления
концептуальной модели НМПУ на волнах кручения со сложной геометрией акустического
тракта для байпасных систем рассмотрим принцип метода магнитострикционных
измерений уровня жидких сред в закрытых резервуарах.
В основе метода магнитострикционных
измерений уровня посредством МПУ лежат известные явления продольной
магнитострикции: эффекты Джоуля, Видемана и Виллари, проявляющиеся в
ферромагнитных материалах ![]() и их сплавах, и
особенно сильно в группе редкоземельных мате-риалов
и их сплавах, и
особенно сильно в группе редкоземельных мате-риалов ![]() [3-5], в виде
изменения продольных размеров.
[3-5], в виде
изменения продольных размеров.
Прямые магнитострикционные явления –
эффекты Джоуля, Видемана, используются для возбуждения продольных и крутильных
упругих ультразвуковых волн (УЗВ) в звукопроводе. Обратный магнитострикционный
эффект, известный как эффект Виллари, применяется для магнитоупругого преобразования
ультразвуковых волн (УЗВ) в электрический сигнал. Для реализации этих эффектов
в МПУ применяются различные по конструктивному исполнению сигнальные
электроакустические преобразователи (ЭАП) [3,4]:
– магнитострикционные преобразователи
сигналов;
– магнитострикционные преобразователи
Видемана (МПВ);
– пьезоэлектрические преобразователи.
Наибольшее распространение в МПУ на волнах
кручения получили выходные сосредоточенные магнитострикционные преобразователи
(СМП) вследствие простоты технической реализации и надежности, высоких
технических характеристик. Поэтому известный подход в использовании входных МПВ
и выходных СМП применим в построении схемы исследуемого типа НМПУ на крутильных
волнах для байпасных систем. Вместе с тем, возможны и другие способы
возбуждения (записи) и считывания (чтения) упругих УЗВ в звукопроводах МПУ [3,4].
Измерение уровня ![]() среды
технологического объекта посредством МПУ сводится к ряду физических процессов,
протекающих в его акустическом тракте (звукопровод, ЭАП, усилители сигналов):
среды
технологического объекта посредством МПУ сводится к ряду физических процессов,
протекающих в его акустическом тракте (звукопровод, ЭАП, усилители сигналов):
1.
Возбуждение в
звукопроводе упругих УЗВ кручения с помощью подвижного входного МПВ,
регистрирующего уровень (раздел сред) жидкой среды в резервуаре.
2.
Фиксация моментов
возбуждения и считывания упругих УЗВ посредством неподвижного выходного СМП при
их трансляции по искомому участку звукопровода с известной скоростью для
формирования цифровых импульсных сигналов и соответствующего временного сигнала
![]() уровня
уровня ![]() .
.
3.
Преобразование временных
сигналов ![]() уровня в цифровой код
уровня в цифровой код
![]() требуемого формата вторичным
преобразователем НМПУ.
требуемого формата вторичным
преобразователем НМПУ.
Для повышения разрешающей способности НМПУ
на крутильных волнах для байпасных систем и, исходя из особенностей установки
на технологическом объекте (рис. 1), было предложено использовать его
акустический тракт (звукопровод) U-образной формы, как показано на рисунке 2.
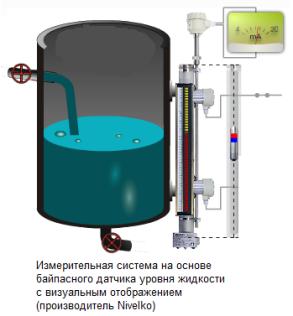
Рисунок 1 –
Байпасная измерительная система с НМПУ
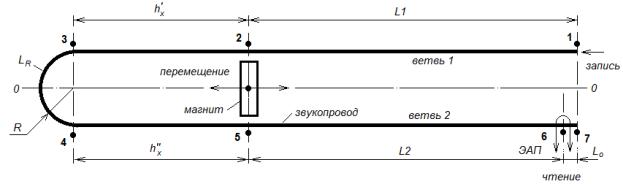
Рисунок 2 –
Расчетная схема U-образного акустического
тракта НМПУ
Такой акустический тракт НМПУ будем классифицировать
как сложной геометрической формы, где упругие УЗВ кручения проходят прямые
участки звукопровода – ветвь 1 и ветвь 2, и радиальный участок ![]() с радиусом
с радиусом ![]() закругления, на
которых рассеивают разные значения волновой энергии и изменяют фазовые скорости
закругления, на
которых рассеивают разные значения волновой энергии и изменяют фазовые скорости
![]() .
.
Посредством подвижного входного МПВ,
представленного поплавком с магнитом и U-образного звукопровода НМПУ из проводящего
магнитострикционного материала , в точках 2 и 5 звукопровода по токовому
сигналу записи возбуждаются (запись) упругие УЗВ кручения ![]() и
и ![]() .
.
В силу четности функции магнитострикции [3]
упругие УЗВ ![]() и
и ![]() расщепляются на две
волны: прямого хода
расщепляются на две
волны: прямого хода ![]() или падающие, и
обратного хода
или падающие, и
обратного хода ![]() или отраженные, т.е.
или отраженные, т.е.
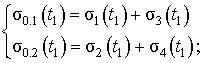 (2.1)
(2.1)
В следующие моменты времени ![]() падающие УЗВ кручения
падающие УЗВ кручения
![]() распространяются по U-образному
звукопроводу НМПУ в сторону выходного ЭАП (СМП) и преобразуются (чтение) в
электрические сигналы. Так, падающая УЗВ кручения
распространяются по U-образному
звукопроводу НМПУ в сторону выходного ЭАП (СМП) и преобразуются (чтение) в
электрические сигналы. Так, падающая УЗВ кручения ![]() , пройдя от т.5 к т.6 ветви 2 звукопровода в момент времени
, пройдя от т.5 к т.6 ветви 2 звукопровода в момент времени ![]() будет считана
выходным ЭАП.
будет считана
выходным ЭАП.
Другая падающая УЗВ кручения ![]() последовательно
проходит от т.2 к т.3 ветви 1 звукопровода
последовательно
проходит от т.2 к т.3 ветви 1 звукопровода ![]() , от т.3 к т.4 его радиального участка
, от т.3 к т.4 его радиального участка ![]()
![]() , от т.4 к т.5 ветви 2
, от т.4 к т.5 ветви 2 ![]() звукопровода и от т.5
к т.6 этой же ветви, и считывается выходным ЭАП, испытывая, при этом, более
сильные искажения формы сигналов, чем первая, падающая УЗВ
звукопровода и от т.5
к т.6 этой же ветви, и считывается выходным ЭАП, испытывая, при этом, более
сильные искажения формы сигналов, чем первая, падающая УЗВ ![]() из-за процессов поглощения
волновой энергии и возможных переотражений.
из-за процессов поглощения
волновой энергии и возможных переотражений.
Далее, по считанным акустическим сигналам ![]() и
и ![]() , преобразованным в электрические импульсные сигналы
, преобразованным в электрические импульсные сигналы ![]() и временные интервалы
и временные интервалы
![]() уровня
уровня ![]() , осуществляется их кодирование с последующим статистическим
вычислением
, осуществляется их кодирование с последующим статистическим
вычислением ![]() во вторичном
преобразователе НМПУ. Алгоритм его работы приведен на рисунке 3, позволяя
разработать методику моделирования данного вида измерительных приборов.
во вторичном
преобразователе НМПУ. Алгоритм его работы приведен на рисунке 3, позволяя
разработать методику моделирования данного вида измерительных приборов.
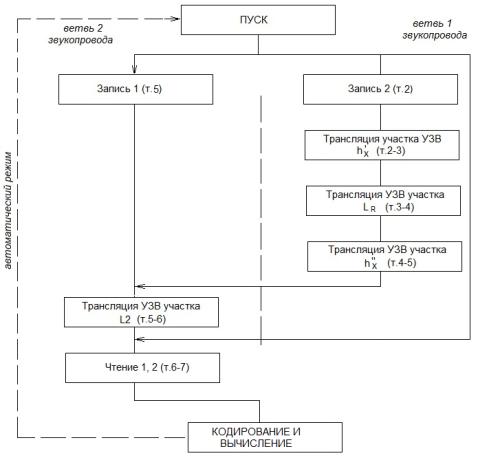
Рисунок 3 –
Алгоритм работы НМПУ на УЗВ кручения
Следует отметить, что только на время
трансляции падающих УЗВ кручения ![]() и
и ![]() вдоль всего
акустического тракта (звукопровода) в пределах
вдоль всего
акустического тракта (звукопровода) в пределах ![]() цифровой канал
вторичного преобразователя НМПУ открыт для приема и преобразования
информационных сигналов уровня. Вне этого периода времени канал вторичного
преобразователя закрыт и не пропускает
переотраженные сигналы в результате переотражений УЗВ кручения обратного хода
цифровой канал
вторичного преобразователя НМПУ открыт для приема и преобразования
информационных сигналов уровня. Вне этого периода времени канал вторичного
преобразователя закрыт и не пропускает
переотраженные сигналы в результате переотражений УЗВ кручения обратного хода ![]() и
и ![]() от незадемпфированных
концов звукопровода (т.1, т.7). Это позволяет одновременно упростить технологию
изготовления его акустического тракта. Отраженные УЗВ кручения обратного хода
после каждого прохождения всего акустического тракта длиной
от незадемпфированных
концов звукопровода (т.1, т.7). Это позволяет одновременно упростить технологию
изготовления его акустического тракта. Отраженные УЗВ кручения обратного хода
после каждого прохождения всего акустического тракта длиной ![]() рассеивают свою энергию
до полного коллапсирования, и в дальнейших расчетах могут не учитываться.
рассеивают свою энергию
до полного коллапсирования, и в дальнейших расчетах могут не учитываться.
Особенности работы НМПУ на волнах кручения
со сложной геометрией акустического тракта, продиктованные видом технического
объекта и условиями эксплуатации, непосредственно отражаются в методике моделирования
и его математической модели. При этом, исходным документом на проектирование
НМПУ является техническое задание (ТЗ).
Применительно к условиям функционирования
байпасных систем пищевой, химической и нефтеперерабатывающей отраслей [6,7],
методика моделирования параметров НМПУ на волнах кручения со сложной геометрией
акустического тракта включает следующие основные этапы:
1.
Составление ТЗ на
исследование и разработку НМПУ.
2.
Определение параметров
байпасной системы, технологического объекта, рабочей среды, условий
эксплуатации, влияние внешних воздействий.
3.
Выбор структуры и параметров
акустического тракта НМПУ на волнах кручения, материалов, его размещения на
объекте, задание алгоритма преобразования сигналов уровня, формы и формата
выходных информационных сигналов.
4.
Моделирование магнитной
энергии постоянного магнита входного подвижного МПВ НМПУ байпасной камеры для
устойчивого возбуждения УЗВ кручения в акустическом тракте сложной
геометрической формы, выбор формы, геометрии и материала магнита и поплавкового
элемента под вид контролируемый среды и геометрические размеры байпасной
камеры.
5.
Моделирование и
определение параметров падающих УЗВ кручения ![]() в заданных точка
звукопровода НМПУ со сложной геометрией акустического тракта с учетом
асимметрии установки на байпасной камере технологического объекта.
в заданных точка
звукопровода НМПУ со сложной геометрией акустического тракта с учетом
асимметрии установки на байпасной камере технологического объекта.
6.
Моделирование и
определение параметров падающих УЗВ кручения ![]() при их трансляции
через отдельные участки звукопровода сложной геометрической формы. Выбор
радиуса
при их трансляции
через отдельные участки звукопровода сложной геометрической формы. Выбор
радиуса ![]() изгиба звукопровода
НМПУ с учетом геометрических размеров байпасной камеры объекта.
изгиба звукопровода
НМПУ с учетом геометрических размеров байпасной камеры объекта.
7.
Моделирование процессов
магнитоупругого преобразования сигналов с использованием СМП. Определение его
параметров и усилительного звена.
8.
Формирование
результирующих сигналов уровня в аналоговом и/или цифровом формате. Проведение
исследований с применением вычислительных методов (имитационного
моделирования). Разработка рекомендаций на проектирование объекта исследования.
На основании этой методики моделирования
разработана структурная схема математической модели НМПУ на УЗВ кручения со
сложной геометрией акус-тического тракта для байпасных измерительных систем с
целью проведения математического исследования, которая показана на рисунке 4.
IV Выводы. Разработанные методика
моделирования и концептуальная математическая модель НМПУ на крутильных волнах
со сложной геометрией акустического тракта для байпасных систем позволяют
проводить математическое исследование данного вида измерительных приборов,
ориентируясь на их широкое промышленное освоение.
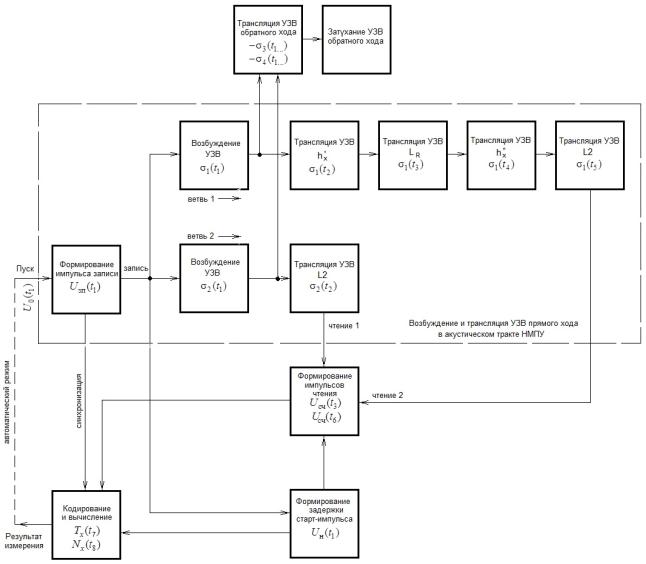
Рисунок 4 – Структура математической
модели НМПУ на УЗВ кручения
со сложной геометрией акустического тракта
ЛИТЕРАТУРА:
1.
Бриндли
К. Измерительные преобразователи.
Справочное пособие. Пер. с англ. Под ред. Е.И. Сычева. – М.: Энергоатомиздат,
1991. – 144 с.
2.
Кулаков
М.В. Технические измерения для химических производств. – М.: Альянс, 2008. –
424 с.
3.
Бергман,
Л. Ультразвук и его применение в науке и технике: Пер. с нем./ Под. ред. В.С.
Григорьева. – М.: Изд-во ИЛ, 1957. – 727 с.
4.
Демин С.Б.
Магнитострикционные системы для автоматизации технологического оборудования:
Монография. – Пенза, Инф.-изд. центр ПГУ, 2002. – 182 с.
5.
Белов,
К.П. Магнитострикционные явления и их технические приложения. – М.: Наука,
1987. – 160 с.
6.
Кулаков
М.В. Технические измерения для химических производств. – М.: Альянс, 2008. –
424 с.
7.
Вильнина
А.В. Современные методы и средства измерения уровня в химической промышленности/
А.В. Вильнина, А.Д. Вильнин, Е.В. Ефремов// – Томск, Изд-во ТПУ, 2011. – 84 с.