УДК 629.067:629.783
ИССЛЕДОВАНИЕ И ВЫБОР СКОРОСТНОГО РЕЖИМА
МОБИЛЬНОГО ОБЪЕКТА В УСЛОВИЯХ ДЕФИЦИТА ИНФОРМАЦИИ
Аралбаев Т.З., Сарайкин А.И., Хасанов Р.И.
ФГБОУ ВПО «Оренбургский
государственный университет», г. Оренбург
В статье представлены результаты исследования
и выбора скоростного режима мобильного объекта в условиях дефицита визуально-навигационной информации.
Ключевые слова: дефицит информации, мобильный объект, выбор
скоростного режима
При проектировании
геометрических характеристик дорог изначально закладываются такие скоростные
режимы и траектории движения мобильных объектов (МО), которые обеспечивают
наилучшую безопасность участников движения [1, 4]. Однако, выбранная кривизна
дороги в любом случае характеризуется уровнем аварийности, особенно, при
различных условиях видимости или сезонных изменениях на дороге. В условиях
дефицита информации и сильных помех зачастую становится невозможно определить
местоположение МО, выбрать безопасную скорость и траекторию движения
относительно границ дороги. Дорожно-транспортная статистика только подтверждает
актуальность указанной проблемы. Одним из способов решения указанной проблемы
является привязка к заранее оцифрованной границе дороги с использованием
автономного вычислительного координатора траектории движения МО.
Исследованию влияния
комплексных показателей геометрических характеристик дорог на безопасность
движения посвящены труды Н.П. Орнатского, В.В. Сильянова, В.В. Чванова [4], А.
Полуса [5]. Полученные рекомендации предлагают разделять дороги на категории в
зависимости от их кривизны, устанавливать скоростные ограничения на каждую категорию и рекомендовать мероприятия по
организации дорожного движения. Исследованию влияния скоростных режимов МО,
дорожных условий на безопасность движения посвящены труды В.Ф. Бабкова, В.В.
Новизенцева [2], В.В. Сильнова, Т.З. Аралбаева [1]. Рекомендации позволяют
выбирать скоростные режимы МО с учётом состояния дорожного полотна согласно
принятой в России классификации автомобильных дорог.
Не смотря на проводимые
исследования в данной области, статистика дорожно-транспортных происшествий [1,
2, 4] показывает, что в условиях дефицита визуальной информации указанные
рекомендации не достаточно обеспечивают безопасность движения. Как следует из
рассмотренных работ [1, 2, 4, 5], концепция управления движением МО в условиях
дефицита информации должна основываться на современных достижениях науки и
техники, а не только на веру в опыт и требуемые значения показателей
психофизиологических характеристик участников движения.
Целью работы является повышение
активной безопасности МО в условиях дефицита визуально-навигационной информации
с использованием автономного вычислительного координатора траектории движения
МО.
Для достижения
поставленной цели выполнены следующие задачи:
1) Разработана концепция
исследования и управления движением МО в условиях дефицита визуально-навигационной
информации. В основу исследовательской части концепции включены этапы:
- построения имитационной модели
скоростного режима при изменении геометрических характеристик дороги;
- определения экстремальных скоростных
режимов МО при наличии погрешностей доступной информации.
В настоящей работы
представлены результаты первого этапа.
Концепция базируется на использовании
автономного вычислительного координатора, который определяет вектор положения
МО на дороге, расстояния до левой и правой границ дороги, управляет движением
МО в зависимости от геометрических характеристик участка дороги, который
заранее оцифрован с использованием специализированного мобильного стенда [1], а
информация о дороге загружена в оперативную память бортового компьютера.
2) Разработана и
исследована имитационная модель управления движением МО на различных
графических примитивах, представленных на рисунке 1, и оцифрованных реальных участков
дорог.
Модель предназначена для
исследования и выбора скоростных режимов МО в условиях дефицита информации на
различных графических примитивах оцифрованных участков дорог. При этом дорога
рассматривается, как протяженный в пространстве объект, границы которого оцифрованы
с требуемой дискретностью.
Выбор имитационного
подхода обусловлен следующими причинами: аналитические методы исследования
имеются, но составляющие их математические процедуры очень сложны и трудоемки;
имитационный подход позволяет исследовать поведение системы во времени и в
геометрическом пространстве; модель используется также для предсказания так
называемых «узких» мест в алгоритме управления МО.
Исходными данными модели
являются: графические примитивы оцифрованных участков дорог; координаты
начального положения первого и второго навигаторов, расположенных,
соответственно, на передней и задней частях кузова МО, и определяющие базу МО;
дискретность получения навигационных данных; скорость движения МО; коэффициент
масштабирования по времени; требуемая дистанция до края дороги, которой должен
придерживаться МО. Выбор траектории движения МО осуществляется исходя из
геометрических характеристик протяженного объекта и требуемого скоростного
режима МО.
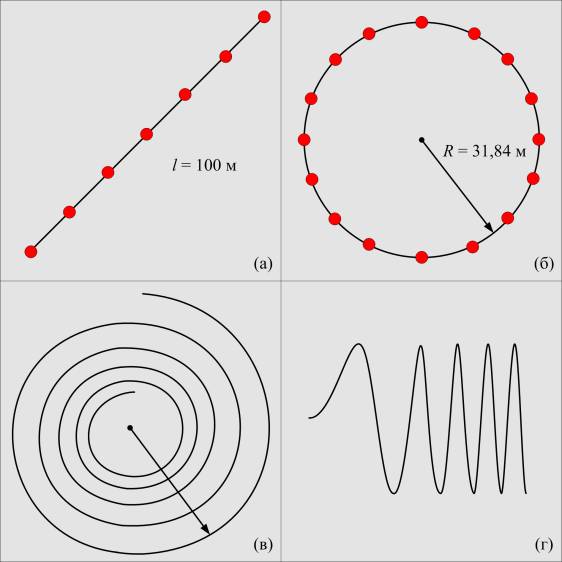
Рисунок 1 – Графические примитивы участков
дорог:
(а) – прямая линия; (б) –
окружность; (в) – спираль; (г) – sweep-сигнал
В основе математического
описания модели лежат геометрические зависимости перемещения МО вдоль линии
оцифрованной границы дорожного полотна с использованием преобразований в
двумерной системе координат.
Выбор графических
примитивов, представленных на рисунке 1, обусловлен характерными типами трасс
автомобильных дорог с геометрической точки зрения. Представленные примитивы
применялись по порядку, от простых линий к сложным изгибам, для оценки
адекватности имитационной модели.
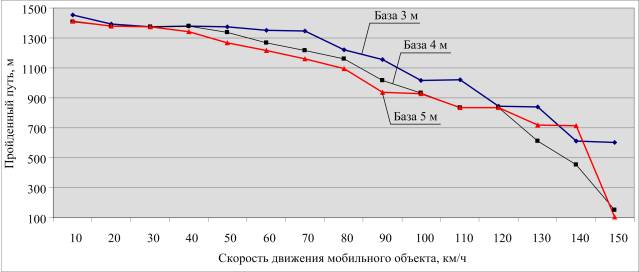
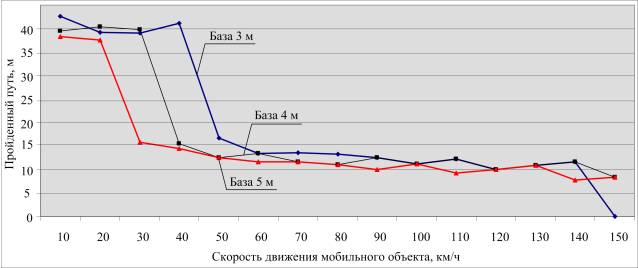
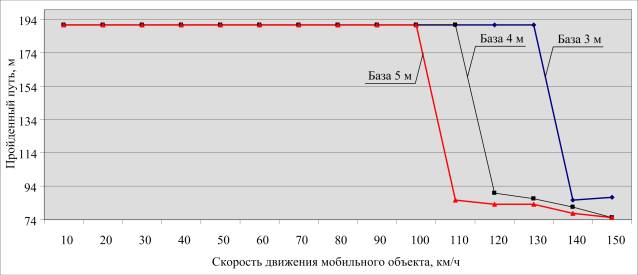
На рисунке 2
представлены графики пройденного пути в зависимости от базы и скорости движения
МО до момента отклонения от запланированной траектории, когда транспортное
средство выходит за разрешенные границы дорожного полотна.
(а)
(б)
(в)
Рисунок 2 – Графики зависимостей пройденного
пути в зависимости от базы и скорости движения МО до момента отклонения от
запланированной траектории для графических примитивов:
(а) – спираль; (б) – sweep-сигнал; (в) – окружность
В работе рассматривались
следующие примитивы участков дорог: спираль, окружность, прямая, sweep-сигнал.
Как видно из рисунков 2
(а) – (в), для выбора скорости движения МО необходимо руководствоваться
геометрической сложностью плана трассы автомобильной дороги, чем сложнее её
топология и рельеф – тем ниже должна быть скорость движения транспортного
средства.
Применение имитационного
подхода позволило сократить временные и стоимостные затраты, связанные с
проведением натурных экспериментов. Исследование модели на примитивах
оцифрованных границ дорог позволяет перейти для использования на реальных
планах трасс автомобильных дорог Оренбургской области.
Разработанная модель
представлена в виде программного средства [3] и функционирует под управлением
операционных систем семейства Windows. К достоинствам разработанного
программного средства следует отнести:
- возможность масштабирования по
времени проводимых вычислительных экспериментов для ускоренного или
замедленного просмотра их результатов;
- наличие базы графических моделей
примитивов участков дорог;
- возможность модификации исходного
кода программы с учетом совершенствования алгоритма управления движение МО в
условиях дефицита информации.
Программа ориентирована
для проектирования и исследования систем компьютерной поддержки водителя,
подсистем автоматического управления движением МО с учётом геометрических
характеристик протяженных в пространстве объектов.
Полученные результаты
позволяют производить привязку скоростного режима МО к конкретному участку
маршрута, рекомендовать безопасный скоростной режим МО, выявлять опасные
участки на этапе планирования маршрута, производить строительство дорог с
учетом экстремальных скоростных режимов МО.
Литература
1.
Аралбаев, Т.З. Управление скоростным режимом автомобиля на основе средств оперативной
оценки состояния дорожного полотна: монография / Т.З. Аралбаев, Р.И. Хасанов. –
Уфа: Академия наук РБ, «Гилем», 2012. – 146 с.
2.
Новизенцев, В.В. Анализ аварийности при наезде транспортных средств на
дорожные ограждения / В.В. Новизенцев, А.С. Сидорова // Наука и техника в
дорожной отрасли. – 2011. – № 1. – С. 6 – 10.
3.
Свид. о рег. прогр. ср-ва № 956 «Имитационная
модель управления движением мобильного объекта в условиях дефицита информации» /
А.И. Сарайкин, Т.З. Аралбаев, Р.И.
Хасанов, Р.Р. Галимов; заявитель и обладатель Оренбургский гос. университет. –
зарег. 17.04.2014.– 8024 Кбайт.
4.
Чванов, В.В. Влияние комплексных показателей кривизны плана трассы дорог на
безопасность движения / В.В. Чванов // Наука и техника в дорожной отрасли. –
2003. – № 4. – С. 9 – 12.
5.
Pulus,
A. The relationship of Overall Geometric Characteristics
to the Safety to the Level of Rural Highways / А. Pulus // Traffic Quarters. – 1980.
– Vol. XXIV. – № 4.