К.т.н., доцент Жуманов М. А., магистрант Байжуманов Е. Б.
КазНТУ им. К. И. Сатпаева, Казахстан
Разработка рабочего органа колесосьемника шин большегрузных
автосамосвалов
В данной работе
разработан захватной механизм колесосъемника шин большегрузных карьерных
автосамосвалов на базе автомобилья МоАЗ.
Механизм для монтажа и
демонтажа пневмоколес (рис.1), которая включает траверсу 1, выполненую из
швеллеров, внутри и снаружи которых сварные угольники 3,7. На траверсу заварено
крепление 11 через которую траверса 1
крепиться к гидроманипулятору установленному на шасси. По внутренним сварным
угольникам 7 передвигается корпус 10 пневмогайковерта 6, а наружные
сварные уголники 3 служат как направляюшие для рычагов зажима 2 захватного
механизма. Выдвижные рычаги зажима 2 выполнены из труб. Так же на траверсе 1
установлены уши 12 для установки гидроцилиндров 4. Гидроцилиндры 4, которые нижней частью крепятся на уши 12
приваренные на траверсу 1, а верхней на выдвижные рычаги зажима 2.
На одной половине
траверсы 1 сделана вырезка для установки пневмогайковерта 6 и его корпуса 10.
Выдвижные рычаги зажима 2 сделаны в форме (Г).
На концах выдвижных
рычагов зажима 2 установлены вращаюшиеся ролики 5 берущие вращение от
электродвигателя 8 и корпус 13 ролика 5. Поверхность роликов 5 выполнена абразвной, в форме профиля шин
колеса, что увеличивает сцепление между колесом и роликом. Корпус 13 ролика
поварачивается устройством для поворота колеса приводом 9 установленном на выдвижных рычагах зажима 2 для того, что бы перевернуть
колесо с вертикального положения в горизонтальный, и положить колесо на землю.
Корпус 10
пневмогайковерта 6 выполнена в виде цилиндра с двумя цилиндрическими направляющими, которые помогают передвигатся корпусу внутри траверсы 1
сцепляясь с направляющими угольниками 7. В корпусе 10 сделана отверстие для
болта 14, который фиксирует гайковерт 6 в 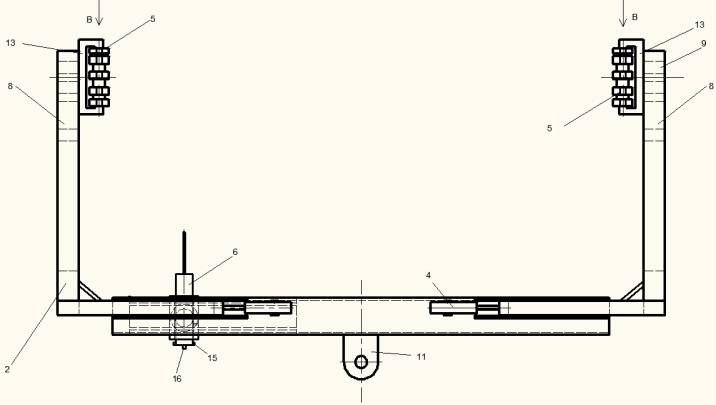
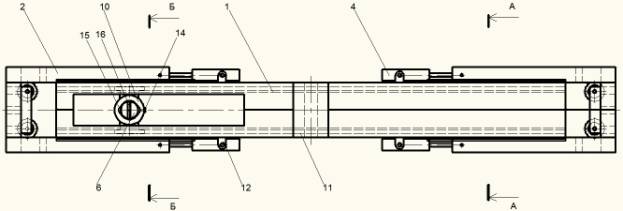 транспортном положении.
транспортном положении.
Рисунок 1. Захватной механизм
В рабочем положении
пневмогайковерт 6 свободно перемещается внутри корпуса 10 для того, чтобы
удобно цеплять гайки монтируемого колеса. На концевой части пневмогайковерта
6 есть уши 15 которые предотвращают
проваливание пневмогайковерта в корпус и ручка 16 для того что бы оператор
держал и управлял пневмогайковертом 6.
В транспортном
положении пневмогайковерт 6 закрепляют болтом 14 и корпус 10 поварачивают так,
что бы он находился вдоль траверсы 1.
Для демонтажа
или монтажа шины
или колеса транспортного средства
колесосъемник подъезжает к
нему и устанавливается в удобное
рабочее положение. Маневрируя
стрелой, механизм захвата устанавливают против снимаемого колеса
и наводят на него. Два подвижно закрепленных на траверсе 1 рычага
зажима 2 выдвигаются по направляющим 3 при помощи гидроцилиндров 4 до нужного
диаметра, и устанавливается вокруг колеса.
За тем
захватные рычаги 2 сжимаются, ролики 5 прижимаются к колесу и захватывают его. Колесо сжимается
гидроцилиндрами 4. Оператор при помощи пневмогайковерта 6, который
передвигается внутри траверсы 1 по направляющим 7, откручивает гайки колеса.
После откручивания первой гайки ролики 5 вращаются при помощи привода
(электродвигателя) 8 и приводят в
вращение колесо до того как следующая гайка дойдет до пневмогайковерта 6. И так последовательно откручиваются гайки.
Захват с
колесом отводят от
объекта по оси
колеса и снимается со ступицы. Колесо поворачивается приводом 9 в
горизонтальное положение и ставится на транспортирующее средство или на землю.
Колесо заменяется, и вышедшего из строя
колесо транспортируют
колесосъемником в ремонтные
мастерские.
Выдвижные рычаги зажима 2 собираются, а пневмогайковерт 6 укрепляется на корпус 10 и ставится в транспортное
положение.
Установка
колеса на объект совершается в
обратном порядке.
Данная конструкция
позволяет нам выполнять монтаж и демонтаж
колес большегрузных автосамосвалов непосредственно на рабочей зоне.
Разработанная
нами конструкция захватного механизма колесосьемника позволит нам более
безопасно произвести замену ремонтирумого колеса автосамосвала, уменьшая простои времени
в ремонте, благоприятно сказывается на коэффициенте технической готовности
парка подвижного состава.
1. КАРЬЕРНЫЕ САМОСВАЛЫ
БЕЛАЗ-7555B, БЕЛАЗ-7555E и их
модификации. Руководство по ремонту 7555-3902080 РС.
2. Проектирование
манипуляторов промышленных роботов и роботизированных комплексов: Учеб. пособие
для студ. вузов, обучающихся по спец. «Робототехнические системы»/ С.Ф.
Дьяченко, А.Н. Тимофеев – М: Высш. шк., 1986, –264 с.: ил.