УДК-621.01
С.Тилоев, М.Х.Саидов, С.М. Саидамиров, М.А.Беков,
Н.Р.Амиров
(Таджикский аграрный университет имени Шириншох
Шотемура), Таджикистан
Многосателлитный планетарный фрикционный механизм привода шпинделей хлопкоуборочной машины
Разработка
эпициклических (планетарных) механизмов привода рабочих органов уборочных машин
с переменными передаточными отношениями является важной задачей в области
теории машин и систем машин. Разработанный привод технических средств относится
к машиностроению, в частности сельскохозяйственного машиностроения
применительно к рабочим органов хлопкоуборочных машин.
Работоспособность хлопкоуборочных
аппаратов характеризуется в основном активностью шпинделей. Для обеспечения
полной активности шпинделей в рабочей зоне необходимо получить переменные
угловые скорости и ускорения требуемые для технологического процесса.
Предлагаемое устройство состоит из двух ступеней и содержит в каждой ступени
шарнирно присоединенные между собой по: четыре кривошипа рис. 1 (водила) 1 со стойкой 2 и зубчатым
колесом 3, присоединенным посредством четырех шатунов 4 к четырем ползунам 5,
двигающимся в полости четырех кулис 6; четыре направляющие 7, соединяющие
кулисы 6 с четырьмя сателлитами (шпинделями) с роликами 8, перекатывающимися по
неподвижной направляющей дорожке (солнечное колесо) 9; в зоне съема - колодку
10 и съемную щетку 11, и в рабочей зоне – ременную дорожку 12.
Устройство работает следующим образом: при
вращении кривошипов (водил) 1 совместно с зубчатым колесом 3 и шатунами 4
вокруг стойки 2 приводятся в движение ползуны 5, которые перемещаясь по оси
кулис 6 через направляющие 7 и передают движение сателлитам (шпинделям) 8,
перекатывающимся по неподвижной направляющей дорожке 9. При этом ролики
сателлитов (шпинделей) 8 в рабочей зоне входят во внутреннее зацепление с
ременной дорожкой 12. Выходя из рабочей зоны по направляющей дорожки (солнечное
колесо) 9 входят в зону съема и далее входят в зацепление колодкой 10. При этом
сателлиты (шпиндели) 8 вращаются в обратном направлении. Собираемая культура
(например, хлопок) снимается с сателлитов (шпинделей) 8 при помощи съемной
щетки 11 и передается в приемную камеру.
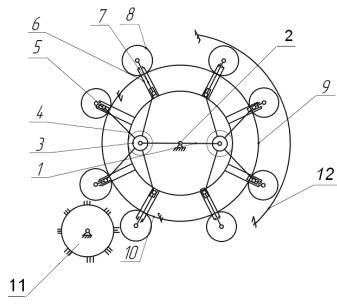
Рис. 1 Многосателлитный эпициклический механизм привода шпинделей
В
многосателлитном планетарном механизме привода уборочных аппаратов
хлопкоуборочной машины в нашем случае имеется n = 6…8
шпинделей, а у существующих равно n = 12 до n = 15 шпинделей (сателлитов).
Кинетическая
энергия исследуемого механизма равна (рис.2)
![]()
где ![]() - приведенный момент
инерции составного водила, кг ∙ м2;
- приведенный момент
инерции составного водила, кг ∙ м2; ![]() - угловая скорость
составного водила, с-1.
- угловая скорость
составного водила, с-1.
Дифференциальные
уравнения исследуемого колеса механизма можно записать в виде:[3-5]
 (1)
(1)
где: МД – движущий момент, приведенный
к оси вращения барабана (составное водило) многосателлитного планетарного
фрикционного механизма от кариолисовой, переносной и вращательной силы инерции,
возникающей в центре вращения сателлита (шпинделя); МС – момент сил
сопротивления, учитывая сопротивление от кустов хлопчатника, силы инерции
вредных сопротивлений, потерь на трение в узлах машины, а также воздействие
машины на почву и вес машины.
Так
как ![]() , или
, или ![]() .
.
Тогда
![]() .
.
Дифференцируя ![]() по времени, получим:
по времени, получим:
![]() .
.
Тогда
уравнение движения примет вид
![]() .
.
А в
случае ![]() дифференцируя
дифференцируя ![]() по времени, получим:
по времени, получим:
![]() .
.
Тогда
![]() .
.
Окончательно
получим следующие дифференциальные уравнения движения:
 (2)
(2)
где переменные коэффициенты С1, С2, d1 и d2 определяются по формулам:
 (3)
(3)

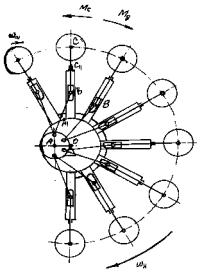
Рис.2. Динамическая схема планетарного привода шпинделей хлопкоуборочной машины.
Уравнения
(2) являются нелинейными дифференциальными уравнениями движения
многосателлитного планетарного механизма, в которых коэффициенты С1,
С2 и d1, d2 являются переменными, периодически изменяющимися в
зависимости от φ и φ1. Решения этих уравнений
возможно методом Рунге-Кутта.
Решение
уравнения (1) позволяют определить параметры машинных агрегатов с планетарными
рабочими органами, обеспечивающими переменные скоростные характеристики и
переменные передаточные отношения между подвижными звеньями уборочных машин, в
частности, хлопкоуборочная машина 14ХВ-2,4А. Дается инженерная методика выбора
основных параметров привода рабочих органов шпинделя (сателлитного колеса).
Литература
1.
Авторское свидетельство № 755240.
2.Тилоев С. и др. Малый патент РТ ТJ № 158-270-287-326
Бюл. 51, 56,57,58 Душанбе.2008- 2010 гг.
3.Усманходжаев Х.Х., Тилоев С. Эпициклический механизм. А.с.
№1033797. Бюл. №29, 1983, 3 с.
4.Тилоев С., Гиеев А. - Материалы II международной конференции
«Механика-97», Вильнюс, 1997,
с.6.
5.Яблонский А.С. Курс теоретической механики. ч.II. М.: 1972, 430 с.
ТЕХНИЧЕСКИЕ НАУКИ
(МЕХАНИКА)