Антонченко В.О., студ., Пуховський
Є.С., д.т.н., проф.
Національний технічний університет
України «КПІ», Україна
СИСТЕМНИЙ
ПІДХІД ДО СТВОРЕННЯ СКЛАДІВ
Автоматизований склад штучних вантажів являє
собою складне технічне спорудження, яке складається з багатьох взаємопов'язаних
елементів, має свою структуру і створено для виконання певних функцій з
перетворення вантажопотоків, накопичення, переробки та розподілу вантажів між
споживачами. Таким чином, склад штучних вантажів повністю потрапляє під
визначення системи як комплексу взаємопов'язаних елементів, створеного для
виконання певної єдиної мети.
Відповідно до методології системного аналізу
прийнято ділити системи за складністю пристрою - на прості, складні і великі;
за характером функціонування - на детерміновані (визначені) і стохастичні
(ймовірні).
Склад штучних вантажів відноситься до складних
імовірнісних системам, так як він складний але влаштуванню, числу вхідних
елементів і параметрів, а прибуття та відправлення вантажів зі складу являють
собою стохастичні процеси. Ці процеси випадкові по своїй природі (наскільки про
це дозволяють судити сучасні знання), але вони можуть бути наближено або
достатньо точно описані за допомогою відомих методів математичної статистики та
теорії ймовірностей.
Системний підхід дозволяє поставити завдання
створення складу в більш широкому масштабі, усвідомити стан, місце, зв'язку
складського об'єкта з зовнішнім середовищем, в якій він функціонує (цехи,
зовнішній і внутрішньозаводський транспорт) і яка накладає на нього свої обмеження.
Для системного підходу характерний ієрархічний
принцип побудови структур, відповідно до якого кожна система є елементом
системи вищого порядку, і навпаки, кожен елемент системи може бути розглянутий
більш поглиблено як система, що має свої елементи і структуру. Звідси кожен
склад - це елемент системи вищого порядку. Так, склади промислового
підприємства є або елементами системи складського господарства заводу
(загальнозаводські склади), або елементами цехової системи (цехові склади), а
складська підсистема є елементом ГАПС.
Створення складу як складної технічної системи
полягає у визначенні його оптимальних параметрів, елементів і структури, тобто
таких параметрів, елементів і структури, які забезпечать складської системі в
експлуатації досягнення поставлених цілей її функціонування при оптимальному
значенні обраної системи критеріїв ефективності.
Для математичного опису такого
характеру змін складської системи може бути застосований математичний апарат
марковських випадкових процесів. Відповідно до цієї теорії склад штучних
вантажів можна розглядати як деяку фізичну систему W, стан якої змінюється з
часом W = W1 (t).
Кожен стан складської системи
можна охарактеризувати деякою ймовірністю Р (Wi):
![]() )
)
При зміні стану складської системи
можуть мінятися або тип цього стану або деякі параметри стану Ai того ж типу.
Наприклад, якщо на вантажному ділянці складу виконують навантаження одного
автомобіля і в цей час прибуває ще один автомобіль або електровізок за
вантажем, то тип стану складської системи не змінюється (видача вантажів на
транспорт), але змінюється обсяг навантажувальних робіт, тобто один з
параметрів стану.
Фазовий простір станів складської системи можна
представити у вигляді матриці станів,
де перший індекс при Wij показує тип
стану, а другий - номер діапазону зміни параметрів стану.
Ймовірності станів і переходів складської системи залежать від
закономірностей зовнішніх вантажопотоків складу. При аналізі випадкового
процесу функціонування складської системи з дискретними станами зручно
користуватися його геометричною схемою - графом станів (рис. 3.2).
Вершини графа, показані кружками, являють стану складської системи, а
дуги графа, показані стрілками, переходи її з одних станів в інші.
Ймовірності станів і переходів складської системи показані поруч з
відповідними вершинами і дугами графа, позначаючи і ці стани і переходи.
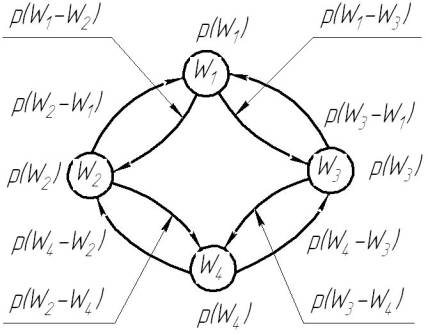
Рис.1 Розмірний граф основних чотирьох станів і переходів
складської системи з одних станів в інші під дією транспортних систем
У загальному вигляді при будь-якому числі
враховуються технологічних операцій і можливих станів і переходів складської
системи ймовірності станів складської системи Рi (k) після k-го кроку переходів
можуть бути визначені за рекуррентною формулою через ймовірність стану системи
після (k- 1) -го кроку

де n - можливе число станів складської системи; Рj (k - 1) -
ймовірність перебування системи в j- му стані, в якому вона опинилася після (k
-1) -го переходу; Р (j> i) ймовірність переходу системи з j-го в i-е стан.
Література
Смехов А.А Автоматизированные
склады. 3-е изд, М. Машиностроение, 1979. 288 с.
Гриневис Г. П.
Комплексно механизированные и автоматизированные склады. М. Транспорт. 1976.
230.
Маликов О.Б.
Проектирование Автоматизированных складов штучных грузов. Машиностроение.
Ленингр. 1981. 240.