Технические
науки / 2.Механика
Ст.преп. Балашов М.Г., студ. Шевцова Э.В., студ. Тюрин В.В.
Севастопольский
национальный технический университет
(Севастополь, Украина)
ЭКСПЕРИМЕНТАЛЬНОЕ
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА СОПРОТИВЛЕНИЯ ДЛЯ ПОЛУПОГРУЖНЫХ ПЛАВУЧИХ КРАНОВ С
ОДНОЙ ПРОМЕЖУТОЧНОЙ КОЛОННОЙ
Введение. Работы по освоению и обустройству морских месторождений требуют принятия
эффективных мер по сокращению времени их выполнения вследствие ограниченного
навигационного периода и обеспечения безопасности при штормовых условиях. В
конце 70 - х годов начато строительство полупогружных плавучих кранов (ППК), с кранами грузоподъемностью
несколько тысяч тонн. Основной проблемой на сегодняшний день является отсутствие
общей методики проектирования таких судов с учетом их конструктивных особенностей,
ходовых характеристик и условий эксплуатации.
Постановка задачи. Выполнить прогоны модели ППК в транспортном положении с
различными горизонтальными клиренсами и получить зависимости относительного сопротивления
от относительной скорости ![]() .
.
Объект исследования. Модель ППК представляет собой полупогружное
двухкорпусное сооружение с шестью/восьмью стабилизирующими колоннами. Главные размерения модели являются осредненными значениями основных
геометрических характеристик полупогружных плавучих
кранов "КС5000", пр.16680, "Balder". В качестве критерия подобия
использовано число Фруда.
Исследования были
выполнены в малом опытовом бассейне гравитационного
типа, кафедры Океанотехники и кораблестроения СевНТУ, имеющим размеры 10х3х1,5 м. Модель ППК имеет
следующие главные размерения: длина корпусов 1,10 м,
ширина одного понтона 0,22 м, высота борта понтона 0,10 м (см.рисунок
1)
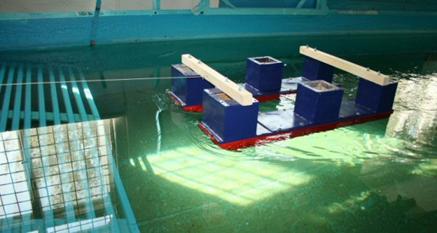
Рисунок 1 – Модель ППК
Выполнено около 800
прогонов модели для транспортного (осадка 95 мм) и рабочего (осадка 180 мм)
положений при шести и восьми колонном варианте при равенстве водоизмещений и шестиколонном с удлиненной средней колонной, с изменением
горизонтального клиренса и при курсовых углах набегающего потока 00
и 900 (в рабочем положении). В процессе пробега модели регистрировалась
скорость установившегося движения. Вес груза с учетом силы трения в
буксировочной системе равен буксировочному сопротивлению модели.
Исследование. В данной статье представлены результаты исследований для транспортного
положения. При этом варьировался горизонтальный клиренс от 0 до 220 мм с шагом
55 мм. Для каждого из клиренсов получены графики показывающие динамику возрастания
скорости при прогонах модели от рабочих грузов, например для 55 мм см.рисунок 2. Расчетная скорость хода ППК-прототипов
колеблится от 6 до 10,5 узлов. Массы рабочих грузов
подобраны экспериментальным путем. Известно, что необходимо использовать для рассмострения участки постоянной скорости на дистанции 2-3
корпуса [1]. На рисунках 2 это видно для участка бассена
от 5 до 8 м.
Для
каждой серии прогонов (на одном грузе, на расчетной длине бассейна) построены
кривые апроксимации, которые позволили определить
среднюю скорость на установившимся движении. Она дает возможность получить кривую
коэффициента сопротивления движения судна для определенного горизонтального
клиренса. На рисунке 3 представлены кривые коэффициента сопротивления ![]() для всех расчетных
случаев клиренса.
для всех расчетных
случаев клиренса.
Рисунок 2 – Динамика роста скорости
при прогонах модели
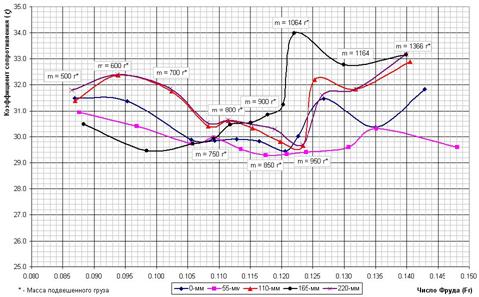
Рисунок 3 – Кривые коэффициента
сопротивления ![]()
Заключение. Получены графики зависимости коэффициента сопротивления от относительной скорости, которые могут быть использованы для оценки мощности энергетической установки ППК для транспортного режима.
Литература
1. Моделирование сопротивления судов в
малом опытовом бассейне/Г.Н. Грищенко, В.Г. Зиньковский-Горбатенко//Вестн. СевНТУ: Сб. науч. тр. – Севастополь, 2005.