Технические науки/12. Автоматизированные системы управления на производстве
В. В.
Ткачев, д.т.н., проф., Р. И. Барабаш, студ., А. В. Бойко, студ.
ГВУЗ
«Национальный горный университет»
просп. К.
Маркса, 19, 49000, г. Днепропетровск, Украина
Исследование энергетических
процессов модели конвейерной установки при использовании преобразователя
частоты и сравнение их с прямым подключением установки е сети
Эта работа посвящена
исследованию энергетических характеристик ленточного конвейера и их
оценке. Задача решается с помощью реальной физической модели конвейерной
установки на основе двигателей
постоянного и переменного токов в комплексе с преобразователя частоты.
Приводится анализ данных, полученных опытным
путем.
Цель
исследований. Разработать модель и на
ее основе исследовать составляющие полной мощности, потребляемой двигателем переменного тока с частотным
преобразователем при изменении режима нагрузки двигателем постоянного тока.
Задачи, которые необходимо решить для
достижения поставленной цели:
1.
Определить составляющие полной мощности и показатели качества энергопотребления электроустановки.
2.
На основе анализа
составляющих полной мощности,
полученных опытным путем, исследовать параметры установки при изменении частоты
питающего напряжения.
Для
решения поставленной задачи
был разработан с использованием преобразователя частоты лабораторный
стенд, в котором конвейер имитировался двигателем постоянного тока.
На рис. 1 показан общий вид универсального стенда, с расположенным на нем
оборудованием.
Стенд
позволяет измерять следующие
электрические параметры:
•
напряжение;
•
ток двигателя конвейера;
•
потребляемую активную, реактивную,
полную мощности;
•
cosφ.
Материалы
и результаты исследований
Надежность работы ленточных конвейеров во
многом определяет динамика пуска. Исследование режимов работы ленточных
конвейеров показало, что в пусковой период характерны значительные изменения
натяжения ленты и не исключены кратковременные пробуксовки ленты относительно
ведущих барабанов, что может приводить к несостоявшемуся запуску и может быть
причиной пожара. В свою очередь значительная экономия энергии связана с
остановкой электродвигателей, приводящих в действия рабочие органы конвейеров,
когда от лав не поступает горная масса, и повторным пуском. При применении
частотного преобразователя можно растянуть время запуска до нескольких минут,
практически убрав динамическую нагрузку, возникающую при пуске. Также, кроме
значительной экономии электроэнергии возможность регулирования скорости ленты
конвейера в зависимости от находящегося
на ней веса позволяет понизить износ механических частей конвейера и
осуществлять точный контроль скорости и момента на валу электродвигателя.
В
настоящее время пуск осуществляется в основном двумя способами: поддержанием
приблизительно постоянными либо момента приводного двигателя, либо ускорения
приводного барабана. Как правило, при таких способах пуска возникают
динамические усилия в ленте, зачастую вдвое и более превышающие нагрузки в
установившемся режиме работы. Неблагоприятная динамика пуска во многом объясняется
тем, что запуск конвейера производится без учета пассивного характера сил
сопротивления движению тягового органа в первый момент пуска – период трогания
конвейера, когда последовательно вовлекаются в движение сечения тягового
органа. Этот факт на сегодняшний день закреплен в статье об особенностях
процесса пуска ленточного конвейере [2]. Предложенный стенд
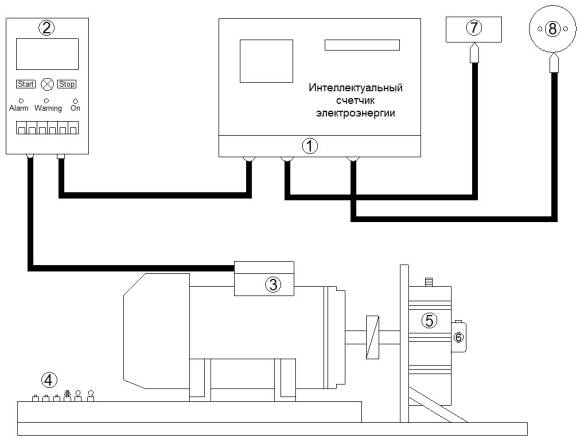
1 – интеллектуальное устройство измерения и учета
электроэнергии;
2 – преобразователь частоты типа Danfoss, VLT 2800;
3 – трехфазный асинхронный двигатель;
4 – элементы ручного управления электродвигателем;
5 – нагрузочная машина;
6 – тахогенератор;
7 – разъем для подключения сети ~220 В;
8 – разъем для подключения сети ~380 В.
Рис. 1
Внешний вид универсального стенда для исследования
способов управления
электроприводом конвейерной установки
предназначается для оценки влияния этого фактора на
динамику пуска.
Исследования энергетических характеристик
системы электропривода переменного тока
выполнялись с использованием полупроводникового преобразователя по
системе преобразователь частоты –
асинхронный двигатель (ПЧ-АД).
Аналитический
анализ был выполнен с применением среды MATLAB. В пакете Simulink
были разработаны измерительные схемы, выполненные в
виде подсистем (subsystem), для измерения активной, реактивной, полной мощности,
КПД и коэффициента мощности.
Разработанные
измерительные схемы позволяют в
целом заключить, что
в пакете MATLAB/Simulink можно
решать следующие задачи:
–
определять и анализировать составляющие полной мощности
и показатели качества потребляемой
электроэнергии в трехфазных симметричных системах;
– реализуя различные алгоритмы управления
полупроводниковым
преобразователем, решать вопросы
нахождения оптимального
алгоритма управления.
Использование предлагаемой модели
асинхронного электропривода
электроустановки в процессе моделирования позволяет оценить энергию,
потребленную из сети, и потери энергии при его работе, т. е. энергетическую эффективность системы асинхронного электропривода.
Для
исследования режимов энергопотребления в системе преобразователь частоты
– асинхронный двигатель (ПЧ – АД) синтезирована
имитационная модель, схема которой приведена на рис. 2.
Параметром управления для имитационной модели с преобразователем частоты служит выходная частота, которая задается в блоке ШИМ.
Для
обеспечения максимального соответствия физической системы и имитационной модели
в качестве параметров для виртуальных блоков взяты паспортные данные элементов
физической системы.
В
ходе моделирования в имитационной модели контролируется
ток I
и
напряжение U каждой фазы,
определяется активная P
и реактивная Q
мощности на основной частоте, полная мощность, cosφ, КПД и параметры
режима двигателя –
ток I , скорость вращения
ω, электромагнитный момент Me.
Параметры, которые контролируются,
необходимы для:
– качественной оценки потребления
электрической энергии двигателя
переменного тока;
– определения негативных факторов, которые
влияют на ток и напряжение сети;
– получения состава полной мощности
модели.
При моделировании исследуемая система преобразователь частоты – асинхронный
двигатель работает в установившемся режиме.
Результаты моделирования приведены на рис. 3, 4. На рис. 3 реактивная мощность Q плавно возрастает, при приближении
двигателя к номинальной скорости. Активная
мощность с приближением системы к
номинальным значениям с небольшим
отклонением линейно зависит от скорости. Полученные кривые на
рис. 4 показывает, как
возрастает полная мощность в
зависимости от изменения скорости электрического двигателя.
Зачастую
ленточные конвейеры не эксплуатируются на полную мощность, их мощность может
меняться в процессе эксплуатации или необходима время от времени. В такой
ситуации необходимо уменьшать скорость ленты конвейера до уровня, который
обеспечит необходимую производительность при текущей загрузке горной массой.
Это обеспечивается уменьшением частоты вращения приводного двигателя, что
сопровождается снижением потребленной мощности.
Для
определения энергетических характеристик работы электромеханической системы,
на базе физической модели
конвейерной установки были
проведены исследования режимов
работы при регулировании с
помощью частоты вращения вала
двигателя, с применением ПЧ. При
этом учитываются все составляющие электрической мощности,
потребляемой установкой.
Физическая (рис. 1) система содержит
следующие базовые элементы:
асинхронный
электродвигатель с короткозамкнутым ротором марки MS 7134 и
преобразователь частоты со
скалярным управлением типа Danfoss,
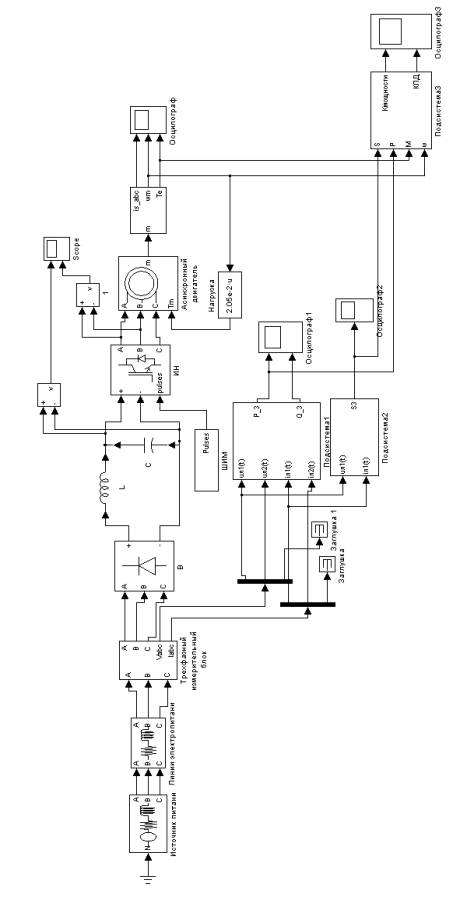
Рис. 2. Модель исследуемой системы сеть −
преобразователь частоты − асинхронный двигатель
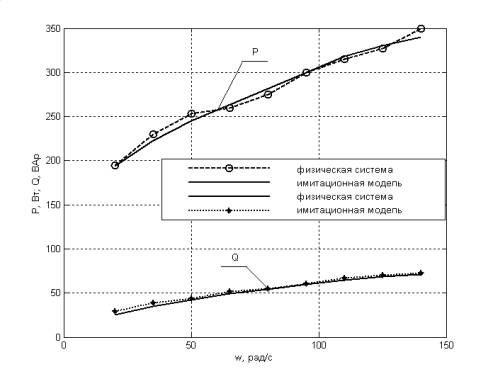
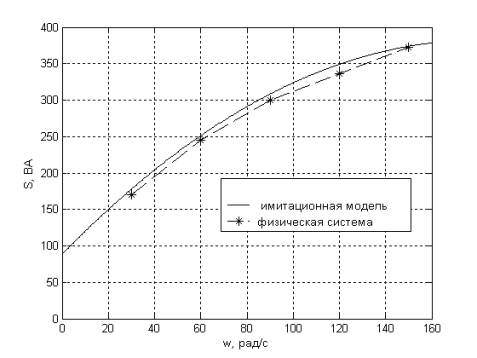 Рис. 3.
Активная и реактивная мощность в сети с ПЧ и асинхронным двигателем при М = 0,7Мn
Рис. 3.
Активная и реактивная мощность в сети с ПЧ и асинхронным двигателем при М = 0,7Мn
Рис. 4.
График зависимости полной мощности S в системе сеть – преобразователь частоты –
асинхронный двигатель от скорости вращения двигателя при Мс = 0,7Мn
VLT 2800, интеллектуальный счетчик, позволяющий
измерять мощность, потребляемую трехфазным асинхронным двигателем. Нагрузочный момент создается
с помощью специального электродвигателя постоянного тока ДПУ 240-1100-3-Д41-09 №0589 с применением управляемого
выпрямителя и СИФУ. Частота вращения измеряется тахогенератором.
Чтобы
оценить степень сходимости параметров имитационной модели с
физической системой для нее были сняты те же характеристики, что и при
моделировании. По этим измерениям
построены графики (рис. 3, 4). Как видим, экспериментальные параметры дали
практически такие же результаты (с
погрешностью 3-5%), что и расчет. Это свидетельствует о правильности
проведенного моделирования.
 Далее были проведены сравнительные
исследования зависимости энергетических
показателей от нагрузки при
частоте питания двигателя 50Гц и при питании от сети с помощью
физической системы и имитационной модели и от ПЧ с помощью физической системы,
результаты которых представлены на рис. 5-7.
Далее были проведены сравнительные
исследования зависимости энергетических
показателей от нагрузки при
частоте питания двигателя 50Гц и при питании от сети с помощью
физической системы и имитационной модели и от ПЧ с помощью физической системы,
результаты которых представлены на рис. 5-7.
Рис. 5. Потребляемая активная мощность Р при питании
двигателя от сети и от ПЧ при частоте 50 Гц.
Рис. 6. Потребляемая реактивная мощность Q при питании двигателя от сети и от ПЧ
при частоте 50 Гц
 Из построенных
зависимостей видно, что активная мощность идентична во
всех случаях, реактивная
мощность в случае с ПЧ
Из построенных
зависимостей видно, что активная мощность идентична во
всех случаях, реактивная
мощность в случае с ПЧ
Рис. 7. Зависимость
коэффициента мощности Кмощ
при питании двигателя от сети и от ПЧ
приблизительно равна
0, а Кмощ =
1 и
следовательно полная мощность в случае подключения к ПЧ меньше, что мы
можем увидеть и в рекламных
буклетах любого производителя
преобразователей частоты. Но так же можем заметить и
то, что ток
статора при подключении
двигателя насоса к ПЧ значительно меньше. Имеет смысл связать данное явление с
компенсвцией преобразователем частоты реактивной мощности.
Анализируя полученные
результаты, можно отметить
достаточную сходимость данных, полученных в ходе экспериментов и в
ходе моделирования.
На
основании приведенного материала
можно сделать следующее
заключение: 1) имитационная
модель, созданная с
применением виртуальных блоков,
адекватно отражает процессы в реальной системе
электропривода; 2)
использование имитационных виртуальных
моделей дает возможность исследовать
электромеханические системы практически
любой сложности.
Выводы
На первом этапе исследований были изложены
методы определения всех составляющих полной электрической мощности
с помощью физической системы и имитационной модели, разработанной в
пакете Simulink Matlab. Была доказано, что если организовать работу
привода конвейерной установки таким образом, чтобы он при изменении
грузопотока изменял частоту вращения, то в итоге можно существенно уменьшить
потребление энергии и стабилизировать производительность.
Проведенные исследования во втором этапе
показали, что при одной и той же
потребляемой мощности и увеличении cosφ,
происходит уменьшение величины протекающего тока и, следовательно, потерь в
электрической сети и трансформаторе, исходя из этого, получаем значительную
экономию электроэнергии. Применение частотных преобразователей уменьшает нагрев
кабельных и воздушных линий, повышает ресурс изоляции.
Список
литературы
1.
Шрейнер Р.Т. Математическое
моделирование электроприводов переменного
тока с полупроводниковыми
преобразователями частоты,
Екатеринбург, УРО РАН, 2000. 654 с.
2.
Гринбаум Ю.В., Лисица
Н.И., Давыдов Л.И. Выбор рациональных параметров пуска ленточных конвейеров //
Геотехническая механика: Межвед. сб. науч. тр. – Днепропетровск. – 2008 – Вып.
73. – С. 11-15.