Метод определения сил, действующих на элементы рулевого управления.
Гурвич
Ю. А., Лебедев Е.П.
Белорусский национальный
технический университет
Возрастающий объем
автоперевозок требует большого внимания к безопасности движения. В обеспечении
безопасности движения значительную роль выполняют стабилизирующие моменты на
поворотных цапфах автомобиля, которые увеличиваются с уменьшением радиуса
поворота и таким образом способствуют ощущению водителем дороги через рулевое
управление. Устойчивое управление колесами возможно лишь тогда, когда
стабилизирующие моменты при криволинейном движении способствуют установке
рулевого управления в нейтральное положение. Однако усилие, прикладываемое к
рулевому колесу для осуществления маневра не должно превышать нормированного
значения. В соответствии с требованиями ОСТ 27.001.487-99 усилие,
прикладываемое водителем к рулевому колесу, не должно превышать 220 Н при
движении с исправным усилителем рулевого управления и 450 Н при
неработающем усилителе.
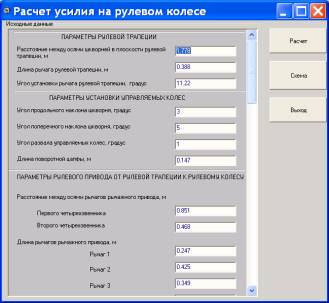
Рисунок 1 Главная
форма программы по расчету усилия на рулевом колесе
На эксплуатационные качества рулевого управления
влияют кинематические параметры рулевого механизма, рулевого привода,
установочные параметры управляемых колес, схема привода ведущих колес и
характеристики шины, связывающие кинематические параметры кругового движения
автомобиля с силами на колесах. Выполнение требований к рулевому управлению
определяют при проведении приемочных испытаний.
Чтобы при
конструировании получить представление об ожидаемых качествах рулевого
управления, целесообразно математическое исследование. Это исследование должно
показать, в каком направлении можно достигнуть улучшения качеств
рулевого
управления.
Программа «Усилие на рулевом колесе» позволяет
определить различные силовые характеристики при повороте автобуса в процессе
движения и повороте рулевого колеса стоящего на месте автобуса. Для этого разработана новая методика, позволяющая еще
на стадии проектирования машины с достаточной для практики точностью рассчитать
усилие на рулевом колесе (без усилителя руля).
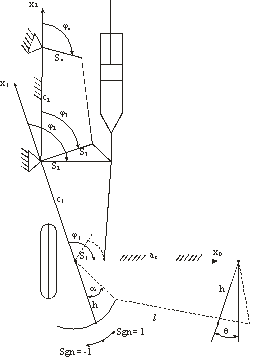
Основным
механизмом рулевого привода является шарнирный четырехзвенник. Этот механизм
используется в качестве рулевой трапеции в составе рулевого привода от рулевого
механизма к рулевой трапеции (рисунок 2).
Задача определения
скоростей и передаточных отношений сводится к совместному решению уравнений
проекций на оси координат контуров, образованных звеньями механизмов с
последующим дифференцированием этих уравнений.
Метод расчета параметров
кругового движения колесной машины [1] излагается без упрощающих допущений об
углах увода, используемых обычно в теории поворота колесных машин [2, 3].
|
Рисунок 2. Кинематическая схема рулевого привода |
|
|
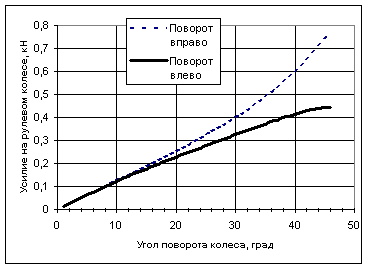
Рисунок 4. Зависимость усилия на рулевом колесе от
угла поворота внутреннего колеса автобуса «МАЗ» полной массой 18т при круговом движении со скоростью 10 км/ч |
|
Машина схематизируется одномассовой пространственной моделью с системой
координат, зафиксированной в центре масс. Ось x системы координат
направлена вперед вдоль продольной оси машины, а z – вниз
перпендикулярно к дороге.
Выполненные
расчеты показали, что усилие, прикладываемое водителем к рулевому колесу
автобуса «МАЗ», при неработающем усилителе и габаритном радиусе поворота ![]() , не превышает нормированного значения 500 Н.
, не превышает нормированного значения 500 Н.
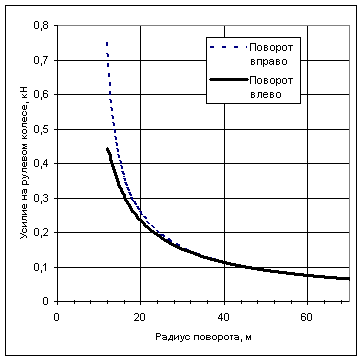
На рисунке 3 приведена
графическая зависимость усилия на
рулевом колесе от радиуса горизонтальной проходимости при левом и правом
повороте (1 – влево, 2 - вправо). На
рисунке 4 приведены зависимости усилия FВ на рулевом колесе от
угла a1
поворота
внутреннего колеса и значений угла a2 внешнего колеса,
автобуса «МАЗ» полной массой 18т при круговом движении.
Выводы. 1. Разработан расчетный метод
определения сил и моментов, действующих в контакте колес с дорогой при круговом
движении автомобиля.
2. Для уменьшения разницы усилий на рулевом
колесе при его повороте «влево - вправо» необходимо изменить передаточное
отношение рычажных механизмов.
3. На
основе разработанного метода расчета сил и моментов, действующих на каждое
колесо машины, усовершенствован способ расчета стабилизирующих моментов на
поворотных цапфах управляемых колес.
4. Разработана и
адаптирована к автобусу «МАЗ» методика, алгоритм и программа для ЭВМ,
позволяющая впервые на стадии проектирования автобуса (или уже у
спроектированного автобуса) определить усилие на рулевом колесе при
неработающем усилителе.
Литература
1.
Андреев А.Ф.
Исследование движения колесной машины с большими углами поворота управляемых
колес// Конструирование и эксплуатация автомобилей и тракторов. Мн., 1991.
Вып.6, с. 60-66.
2.
Андреев А.Ф., Лефаров А.
Х. Статическая поворотливость полноприводных колесных машин с дифференциальным
межосевым приводом// Автотракторостроение: расчеты и исследования агрегатов автомобилей, тракторов
и их двигателей. – Мн.:
Высшая школа 1978, с 71 – 73.
3.
Фаробин Я.Е. Теория
поворота транспортных машин – М.: Машиностроение, 1970. – 176 с.