Технічні науки/12. Автоматизовані системи керування на виробництві
Ковриго Ю.М., Мовчан А.П., Снижко А.В., Матковский
П.Ю.
Національний
технічний університет України «КПІ», Україна
Методика настройки одноконтурной
системы регулирования переменной структуры
При управлении нестационарными объектами со
значительным запаздыванием, которые распространены в теплоэнергетике и других
отраслях промышленности, возникает необходимость применения систем управления,
которые обеспечивают высокие показатели
качества регулирования.
Перспективным
является применение регулятора переменной структуры [1].
Недостаток такого регулятора – отсутствие
инженерных методов его настройки, что ограничивает его использование на
практике.
Цель
работы – получить инженерные рекомендации для выполнения расчета настроек
регулятора в одноконтурной автоматической системе регулирования (АСР).
В качестве модели объекта управления
рассмотрим передаточную функцию по температуре первичного перегрева пара при
возмущении охладительной водой, которая представляет собой апериодическое звено
первого порядка с запаздыванием:
 . (1)
. (1)
Установлены ограничения на прямые показатели качества
системы: динамический заброс ![]() .
.
Регулирующее
воздействие регулятора формируется по закону:
 , (2)
, (2)
где y – кусочно-постоянная функция.
 ,
, ![]() , где
, где  , (3)
, (3)
где ![]() – сигнал рассогласования,
– сигнал рассогласования, ![]() – параметры настройки регулятора, t – время выдачи
регулирующего воздействия регулятором.
– параметры настройки регулятора, t – время выдачи
регулирующего воздействия регулятором.
Для режима работы АСР
![]() и выбранных показателей качества экспериментально найдены
настройки регулятора:
и выбранных показателей качества экспериментально найдены
настройки регулятора:
![]() . (4)
. (4)
Затем были
проведены исследования чувствительности характеристик АСР к изменению
параметров объекта в диапазоне
![]() (5)
(5)
и найдены параметры настройки регулятора:
 (6)
(6)
Также при исследовании было определено, что при ![]() , оптимальная
настройка регулятора переменной структуры зависит только от выбора
, оптимальная
настройка регулятора переменной структуры зависит только от выбора ![]() .
.
Для вышеуказанных параметров настройки регулятора по экспериментальным
данным была определена зависимость ![]() , показанная на рис. 1, по которой видно, что экспериментальные данные с достаточной точностью
могут быть описаны уравнением
, показанная на рис. 1, по которой видно, что экспериментальные данные с достаточной точностью
могут быть описаны уравнением ![]() . Для нахождения неизвестных
. Для нахождения неизвестных ![]() и
и ![]() использован графический метод выравнивания и получено уравнение зависимости
использован графический метод выравнивания и получено уравнение зависимости ![]() :
:
 (7)
(7)
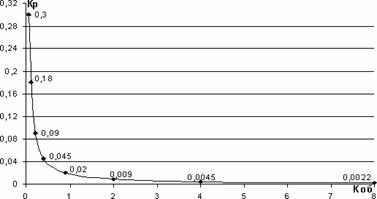
Рис. 1. Зависимость коэффициента передачи регулятора ![]() от коэффициента
передачи объекта
от коэффициента
передачи объекта ![]() .
.
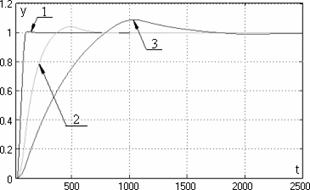
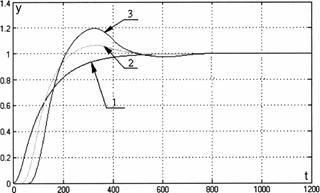
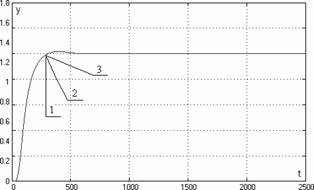
Влияние
изменения параметров объекта управления на переходные характеристики по каналу
“задание-выход” показаны на рис. 2, 3, 4, 5:
|
|
|
1)
|
1)
|
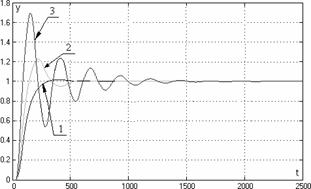
Влияние пропорциональной составляющей объекта ![]() на переходные
характеристики по каналу “задание-выход” без коррекции
на переходные
характеристики по каналу “задание-выход” без коррекции ![]() по вышеприведенной
формуле показаны на рис. 4, с коррекцией
по вышеприведенной
формуле показаны на рис. 4, с коррекцией ![]() приведены на рис. 5:
приведены на рис. 5:
|
|
|
1)
|
1)
|
Выводы
1.
Таким образом, в результате исследований методом математического моделирования
разработан инженерный метод настройки регулятора переменной структуры, который
предполагает выбор настраиваемых параметров в зависимости от диапазона
изменения параметров объекта (6):
2.
Предложенный метод построения и настройки одноконтурной АСР обеспечивает
эффективную работу при изменении параметров объекта управления в диапазоне: ![]() при настройках,
выбираемых из приведенных соотношений и коррекции коэффициента передачи
регулятора
при настройках,
выбираемых из приведенных соотношений и коррекции коэффициента передачи
регулятора ![]() в зависимости от
изменения
в зависимости от
изменения ![]() согласно найденного
соотношения.
согласно найденного
соотношения.
Литература
1. Уланов А.Г., Теория и разработка адаптивных
регуляторов с переменной структурой. автореферат диссертации на соискание
ученой степени к.т.н. – М. – 1977. – 18 с.