Маногаров
А.И., Дробязко А.Н., Забара И.С., Ковальчук М.А., Парфенова И.А., Подколзин
В.В., Цой Д.Д.
Кубанский
государственный университет, Россия
Результаты 3D-сканирования сцены
и полуавтоматического снятие мерок объекта
В
настоящее время создано множество контактных и бесконтактных 3D-сканеров, но существует необходимость разработки
доступных программных кодов для распространенных аппаратных средств. В
Кубанском государственном университете разработан бесконтактный активный
3D-сканер, используемый совместно с устройством Kinect, выпущенным компанией
Microsoft для игровой приставки Xbox. Kinect включает в себя инфракрасный
излучатель, инфракрасный приемник, камеру, 4 микрофона, корректировщик наклона
по вертикали. Kinect может получать трехмерное изображение при любом
естественном освещении. Сенсор подключается к компьютеру через USB,
одновременно можно подключить до четырех сенсоров. Диапазон рабочих расстояний
от 0.5 до 3 метров.
При написании программного кода нами
использовалась Point Cloud Library – открытая библиотека для обработки 3D
геометрии, содержащая алгоритмы фильтрации, функции оценки, реконструкции
поверхности, регистрации, подгонки моделей, сегментации.
Разработанная программа (рис. 1) позволяет
осуществлять сканирование окружающей 3D сцены в соответствии с заданными размерами
(рис. 2), полуавтоматическое снятие мерок объекта (рис. 3), просмотр полученной
3D модели, дальнейшее сохранение полученных результатов сканирования в формате
3D редактора «*.obj».
Реализованы возможности:
- сканировать 3D сцену;
- приостанавливать процесс реконструкции;
- возобновлять процесс реконструкции;
- сбрасывать процесс реконструкции для
нового сканирования сцены;
- сохранять полученные результаты
сканирования;
- просматривать 3D сцену, полученную при сканировании;
- получать размеры объекта по двум
заданным точкам.
Тип ЭВМ, дл которого разработана программа
– GPU с аппаратной поддержкой технологий Direct3D 11 и C++ Accelerated Massive Parallelism,
Ram 4Gb, Intel Core I5-2450M 2.50 GHz, HDD 160Gb.
Язык программирования – С++, C#.
Операционная система, поддерживающая
программу, – MS Windows 7(64bit), Kinect
For Windows SDK, Windows SDK, DirectX11.
Объем программы – 58,0 Кb.
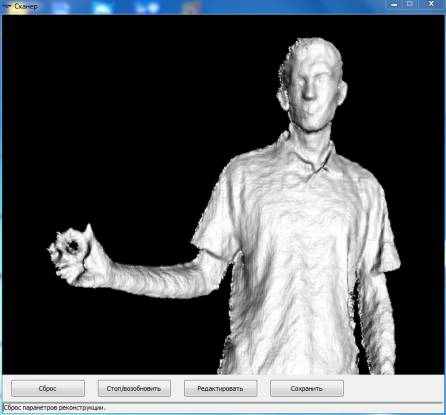
Рисунок 1 – Главное окно программного приложения

Рисунок 2 – 3D сцена
готова для обработки
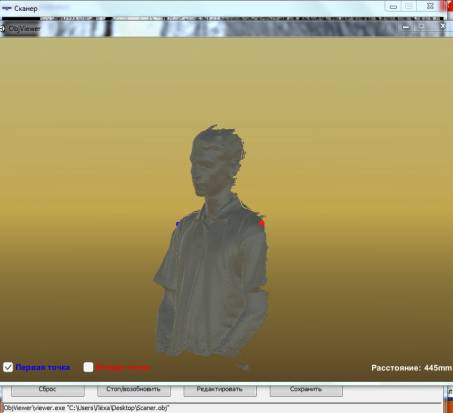
Рисунок 3– Измерение расстояния между 2 точками 3D сцены