Доповідь/Технічні науки – Автоматизовані системи управління на виробництві
УДК
681.5
Зварич З.М.
Івано-Франківський національний
технічний університет нафти і газу
Оптимізація
параметрів цифрових fuzzy-регуляторів
Застосування нечіткого
регулятора (НР) для керування різними об`єктами показує їх високу ефективність
і в ряді випадків суттєві переваги перед лінійними цифровими
регуляторами [1,2]. Основними параметрами цифрових НР, при яких
відбувається їх синтез і розрахунок, є, кількість і форма функцій належності (ФН)
![]() лінгвістичних величин і діапазони зміни вхідних і вихідної лінгвістичних змінних помилка системи θ, перша похідна
помилки
лінгвістичних величин і діапазони зміни вхідних і вихідної лінгвістичних змінних помилка системи θ, перша похідна
помилки ![]() , друга похідна
помилки
, друга похідна
помилки ![]() , керуючий вплив на об'єкт m, тобто [θmin , θmax], [
, керуючий вплив на об'єкт m, тобто [θmin , θmax], [![]() min ,
min , ![]() max] і [mmin , mmax].
max] і [mmin , mmax].
Вибір ФН при синтезі НР для систем автоматичного
керування (САК) має специфічні особливості, які обумовленні тим, що на вхід НР,
як правило, поступають три лінгвістичні змінні: помилка системи θ, швидкість зміни (перша похідна) помилки ![]() , прискорення(друга похідна) помилки
, прискорення(друга похідна) помилки ![]() , які якісно можна охарактеризувати (за допомогою
спрощення розрахунків), наприклад негативна
-1, позитивна – 2.
, які якісно можна охарактеризувати (за допомогою
спрощення розрахунків), наприклад негативна
-1, позитивна – 2.
Ці терм-множини описуються на універсальній множині U відповідно двома ФН:
![]() і
і ![]() . ФН визначає степінь належності
кожного елементу u множині U числом між 0 і 1, яке називають степенем істинності
даної лінгвістичної змінної даному терму. Тому функції
. ФН визначає степінь належності
кожного елементу u множині U числом між 0 і 1, яке називають степенем істинності
даної лінгвістичної змінної даному терму. Тому функції ![]() і
і ![]() повинні бути
симетричними одна відносно одної і перетинатися при u = 0,5. крім того, функція
повинні бути
симетричними одна відносно одної і перетинатися при u = 0,5. крім того, функція ![]() повинна бути спадаючою, а
повинна бути спадаючою, а ![]() - зростаючою.
- зростаючою.
Із врахуванням вищесказаного можна записати наступні аналітичні вирази, які
часто використовуються на практиці ФН для вхідних лінгвістичних
змінних при проектуванні цифрових НР САК:
·
для трикутних ФН:
![]() = u / c, 0 ≤ u ≤ c;
= u / c, 0 ≤ u ≤ c;
![]() = (1- c - u) / (1- 2c), c ≤ u
≤ 1 – c;
= (1- c - u) / (1- 2c), c ≤ u
≤ 1 – c;
![]() = 0, 1 – c ≤ u ≤ 1;
= 0, 1 – c ≤ u ≤ 1;
![]() = 0, 0 ≤ u ≤ c; (1)
= 0, 0 ≤ u ≤ c; (1)
![]() = (u -
c) / (1- 2c), c ≤ u
≤ 1 – c;
= (u -
c) / (1- 2c), c ≤ u
≤ 1 – c;
![]() = (1- u) / c, 1- c ≤ u ≤ 1;
= (1- u) / c, 1- c ≤ u ≤ 1;
·
для трапецеєвидних ФН:
![]() = 1, 0 ≤ u
≤ c;
= 1, 0 ≤ u
≤ c;
![]() = (1- c - u) / (1- 2c), c ≤ u
≤ 1 – c;
= (1- c - u) / (1- 2c), c ≤ u
≤ 1 – c;
![]() = 0, 1 – c
≤ u ≤ 1;
= 0, 1 – c
≤ u ≤ 1;
![]() = 0, 0 ≤ u
≤ c; (2)
= 0, 0 ≤ u
≤ c; (2)
![]() = (u - c) / (1- 2c), c ≤ u
≤ 1 – c;
= (u - c) / (1- 2c), c ≤ u
≤ 1 – c;
![]() = 1, 1 – c
≤ u ≤ 1;
= 1, 1 – c
≤ u ≤ 1;
(у формулах (1) і (2) параметром с
можна варіювати в межах 0 ≤ с ≤ 0,49;
При с = 0 ![]() = (1- u),
= (1- u), ![]() = u, 0 ≤ u ≤ 1;
= u, 0 ≤ u ≤ 1;
·
для піднесених в степінь трикутних ФН:
![]() =
(1- u)с,
=
(1- u)с, ![]() =
uс. (3)
=
uс. (3)
·
для дзвоноподібних ФН:
 . (4)
. (4)
·
для гаусових ФН
![]() ,
, ![]() . (5)
. (5)
·
для експоненціальних ФН:
![]() ,
, ![]() (6)
(6)
ФН, які аналітично визначаються
формулами (3)- (6), мають лише один параметр – коефіцієнт с, яким можна варіювати при налаштуванні НР, що влаштовує з
практичної точки зору.
Для вихідної
лінгвістичної змінної - керуючого впливу
на ОК m можна використовувати такі ж ФН, як і
для вхідних лінгвістичних змінних.
Як приклад на рис.1 показані
експоненціальні ФН на універсальній множині і
діапазони змінних, а також результуюча ФН (жирна лінія) для конкретних змінних.
Результуюючу ФН
отримують як правило «мінімаксним» методом, а розрахунок абсциси "центру
тяжіння" sc=S(uc , µc) ділянки площі, що охоплена результуючою ФН μ(u) в межах
зміни змінної u від u = U1 до u = U2, зручно
виконувати, використовуючи чисельне інтегрування за методом трапецій (з кроком
дискретизації u0), за формулою:
 , (7)
, (7)
де (U2 –U1) / M = u0 - крок дискретизації, М- число дискрет на інтервалі U2 –U1, i =1,2,3,..., М
-1.
При визначенні результуючої ФН необхідно абсциси точок перетину ФН
нечітких підмножин ( наприклад, термів позитивни-1,
негативний-2) з горизонтальними прямими. Найбільш просто це виконати для
трикутних ФН.
Для ФН виду: ![]() = (1- u)с,
= (1- u)с,
![]() = uс, u
= uс, u ![]() [0, 1]
[0, 1]

Рисунок 1 - Експоненціальні ФН на універсальній множині змінних з результуючою
ФН (лінія АВ)
абсциси точок перетину
визначаються як:
u* = 1- ![]() і u* = 1-
і u* = 1- ![]() .
(3.40)
.
(3.40)
Для ФН
дзвоноподібного виду:
 , u
, u ![]() [0,
1],
[0,
1],
абсциси точок перетину
визначаються як:
u* = с![]()
 і u* = 1+ с
і u* = 1+ с![]()
 . (8)
. (8)
Для гаусових ФН
виду (8) абсциси точок перетину
визначаються як:
u* = с![]() і u* = 1- с
і u* = 1- с![]() .
(9)
.
(9)
Для експоненціальних ФН виду:
![]() ,
, ![]() , u
, u ![]() [0,
1],
[0,
1],
абсциси точок перетину
визначаються як:
u* = -![]() ln
ln![]() і u* = 1+
і u* = 1+![]() ln
ln![]() . (10)
. (10)
Остаточний вибір ФН
для НР в САК можливий лише при оптимізації основних параметрів
регулятора (діапазонів зміни ЛЗ, форми і параметрів ФН лінгвістичних величин).
При оптимізації
параметрів цифрових регуляторів необхідно задавати критерій якості і функції
впливу (керуючий і/або збурюючий вплив) на систему. Найбільш часто
використовують один із квадратичних критеріїв якості, наприклад:
J =  , (11)
, (11)
де помилка системи ![]() обчислюється з кроком моделювання h0 , а число L визначає інтервал спостереження. Оптимальні параметри
відповідають мінімальному значенню критерію якості, а мінімізація критерію
якості автоматично приводить до оптимізації
перехідних процесів в САК. Можна використовувати різні алгоритми умовної і
безумовної оптимізації.
обчислюється з кроком моделювання h0 , а число L визначає інтервал спостереження. Оптимальні параметри
відповідають мінімальному значенню критерію якості, а мінімізація критерію
якості автоматично приводить до оптимізації
перехідних процесів в САК. Можна використовувати різні алгоритми умовної і
безумовної оптимізації.
Розглянемо САК (рис.2) з цифровим НР і нестаціонарним ОК, «заморожена» ПФ якого
визначається формулою: G(s) = ![]() =
= 
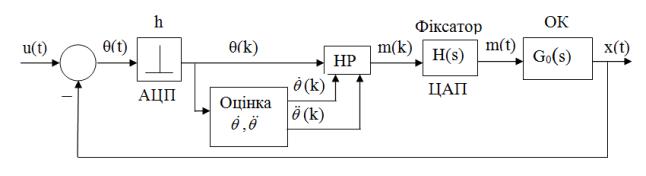
Рисунок 2 - Структурна
схема САК з нечітким регулятором
Припустимо, що синтез НР виконаний при заданих законах
зміни параметрів функції передачі ОК, вхідного впливу і трикутних ФН. При цьому вибрані
без оптимізації (налаштування «вручну») діапазони зміни вхідних і вихідних
параметрів НР (діапазони зміни змінних θ,
![]() ,
, ![]() , m ) визначаються:
, m ) визначаються:
[θmin , θmax] = [-1,02; 1,02], [![]() min ,
min , ![]() max] = [-4; 4],
max] = [-4; 4],
[![]() min ,
min , ![]() max ] = [-24; 24] i [mmin , mmax] = [-1, 1].
max ] = [-24; 24] i [mmin , mmax] = [-1, 1].
Крок квантування в цифровому НР h = 0,01с, крок моделювання h0 = 0,0005с. Квадратичний критерій якості має показник: J = 0,021.
Після
оптимізації отримуємо наступні діапазони
зміни вхідних і вихідних параметрів НР (діапазони зміни змінних θ, ![]() ,
, ![]() , m ):
, m ):
[θmin , θmax] = [-1,02; 1,02], [![]() min ,
min , ![]() max] = [-2,75; 2,75],
max] = [-2,75; 2,75],
[![]() min ,
min , ![]() max ] = [-16,52; 16,52] i [mmin , mmax] = [-1, 1].
max ] = [-16,52; 16,52] i [mmin , mmax] = [-1, 1].
Квадратичний критерій якості має
показник: J = 0,0168.
Можна використати різні
форми ФН (3)–(6) і, варіюючи одночасно коефіцієнтом с і діапазонами зміни вхідних і вихідних
параметрів (діапазони зміни змінних θ,
![]() ,
, ![]() , m), визначати
мінімальне значення показника J.
, m), визначати
мінімальне значення показника J.
Проведені розрахунки методом Хука-Дживса з
використанням формул (3.39) – (3.44) дають наступні результати. Найбільше із мінімальних значеннь показника J одержується при використанні ФН, які визначаються за
формулою (3.36), при наступних параметрах цифрового НР: с = 10-4;
[θmin , θmax] = [-1,02; 1,02],
[![]() min ,
min , ![]() max] = [-2,14; 2,14],
max] = [-2,14; 2,14],
[![]() min ,
min , ![]() max ] = [-22,23;
22,23]
i [mmin , mmax] = [-1, 1].
max ] = [-22,23;
22,23]
i [mmin , mmax] = [-1, 1].
Квадратичний критерій якості має
показник: J = 0,0197.
Найменше із мінімальних значеннь показника J одержується при
використанні експоненціальних ФН, які визначаються за формулою (7) і (8), при
наступних параметрах цифрового НР: с
=72,5;
[θmin , θmax] = [-1,02; 1,02],
[![]() min ,
min , ![]() max] = [-3,75; 3,75],
max] = [-3,75; 3,75],
[![]() min ,
min , ![]() max ] = [-22,98;
22,98]
i [mmin , mmax] = [-1, 1].
max ] = [-22,98;
22,98]
i [mmin , mmax] = [-1, 1].
Квадратичний критерій якості має
показник: J = 0,0136.
Таким
чином, для розглянутої САК експоненціальні ФН є найкращими при вибраному критерію
якості. З метою вибору оптимальних параметрів fuzzy-регуляторів із конкретних об’єктів
керування слід проводити розрахунки із різних ФН і, використовуючи
оптимізаційні програми, вибирати ФН, при яких обчислений показник якості J є мінімальним.
Висновок. За допомогою програм Opt_HD реалізовано алгоритм безумовної оптимізації методом Хука-Дживса параметрів fuzzy-регуляторів (діапазони зміни змінних ![]() ,
, ![]() ) САК нестаціонарним ОК і продемонстровано результати дослідження
точності відпрацювання САК із НР заданого закону зміни вхідного впливу.
Оптимізація
параметрів приводить до значного покращення якості СУ, яке характеризується
величиною поточної помилки і чисельно визначається показником J.
) САК нестаціонарним ОК і продемонстровано результати дослідження
точності відпрацювання САК із НР заданого закону зміни вхідного впливу.
Оптимізація
параметрів приводить до значного покращення якості СУ, яке характеризується
величиною поточної помилки і чисельно визначається показником J.
1. Гостев В.И. Оптимизация параметров цифровых нечетких
регуляторов / В.И.Гостев, И.П.Лесовой, А.Е.Чуприн // Радиоэлектроника
Информатика Управление.- 2001.- С.148-151.
2. Архангельський В.І. Досвід розвитку і застосування
систем функції-управління / В.І.Архангельський., І.Н.Богаенко та ін. // Автоматизація
виробничих процесів. – 1997. - №2(5). – С.1-10.
3. Алиев Р.А. Неченткие модели
управления динамическими системами / Р.А.Алиев, Э.Г.Захарова, С.В.Ульянов //
Итоги науки и техники. Сер. Техническая кібернетика. – М.: ВИНИТИ АН СССР,
1990, т.29, С.127-201.