Зелінко А., студ.,
Кореньков В.М., к.т.н., доц.
НТУУ «Київський
політехнічний інститут», м. Київ, Україна
ВИЗНАЧЕННЯ ЧАСУ ВИКОНАННЯ УПРАВЛЯЮЧОЇ ПРОГРАМИ З
УРАХУВАННЯМ РОЗГОНУ ТА ГАЛЬМУВАННЯ ПРИВОДІВ ВЕРСТАТУ З ЧПК
В статті йдеться про визначення найбільш близького до
реального часу оброблення заготовки, тобто урахування часу розгону і
гальмування, у залежності від моменту інерції всієї системи робочого органу та сил
різання. Для спрощення надалі розглядається випадок руху по двом осям – х та у.
Позначення:
![]() час i-го переходу, [с];
час i-го переходу, [с];
![]() час розгону, [с];
час розгону, [с];
![]() час рівномірного руху, [с];
час рівномірного руху, [с];
![]() час гальмування, [с];
час гальмування, [с];
![]() довжина пройденої ділянки, [мм];
довжина пройденої ділянки, [мм];
![]() подача, [мм/хв];
подача, [мм/хв];
![]() електромеханічна стала двигуна, [с];
електромеханічна стала двигуна, [с];
![]() момент інерції обертання двигуна, [кг/м2];
момент інерції обертання двигуна, [кг/м2];
![]() кутова швидкість двигуна, [рад/с];
кутова швидкість двигуна, [рад/с];
![]() пусковий момент двигуна, [Н/м];
пусковий момент двигуна, [Н/м];
![]() момент інерції робочого органу до осі x або y, [Н/м];
момент інерції робочого органу до осі x або y, [Н/м];
![]() момент опору, залежить від сили різання, [Н/м];
момент опору, залежить від сили різання, [Н/м];
![]() частота обертання двигуна, [об/хв];
частота обертання двигуна, [об/хв];
![]() подача по відповідній осі двигуна x/y, [мм/хв];
подача по відповідній осі двигуна x/y, [мм/хв];
![]() передаточне відношення черв’ячної передачі двигун-робочий орган, [мм/об];
передаточне відношення черв’ячної передачі двигун-робочий орган, [мм/об];
![]() – головна складова
сили різання, [Н];
– головна складова
сили різання, [Н];
![]() – діаметр інструменту,
[мм];
– діаметр інструменту,
[мм];
![]() – питома сила
різання, [МПа];
– питома сила
різання, [МПа];
![]() – площа зрізуваного
шару, [мм2/об];
– площа зрізуваного
шару, [мм2/об];
![]() – твердість
матеріалу заготовки за Брінеллем, [МПа];
– твердість
матеріалу заготовки за Брінеллем, [МПа];
![]() – глибина різання, [мм];
– глибина різання, [мм];
![]() – подача, [мм/об];
– подача, [мм/об];
![]() кількість технологічних переходів.
кількість технологічних переходів.
1 Вступ
Проблема визначення
часу оброблення заготовки на верстаті з числовим програмним управлінням (ЧПУ) є
на сьогоднішній день досить актуальна, оскільки у загальному випадку цей час
визначають у САМ-системі, яка не враховує динаміку серводвигуна і вплив процесу
різання, тому у випадку досить масивної програми (оброблення лопатки турбіни)
реальний час оброблення і час, розрахований у САМ-системі будуть суттєво
відрізнятися, що створює проблеми при попередніх розрахунках для запуску у
виробництво поточної продукції. Для того, щоб визначити цей час більш точно
нижче наведені формули, що враховують перехідні процеси серводвигуна у
залежності від навантаження та зміни подачі, а також процес різання, а саме
силу різання та її вплив на час розгону та гальмування. Для спрощення формули
наведено лише для двох осей – х та у, для стійок FANUC.
У загальному випадку
технологічний перехід складається з розгону, рівномірного руху і гальмування
(рис. 1). Тому час складається з трьох частин:
|
|
Рисунок 1 – Загальний випадок часу
одного переходу |
|
|
|
|
|
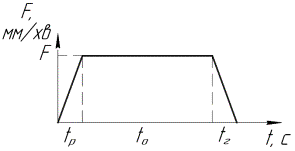
Отже, на кожному переході затримка буде становити
половину часу розгону і половину часу гальмування.
2 Визначення
часу рівномірного руху
В САМ-системах час зазвичай обчислюють за формулою:
![]()
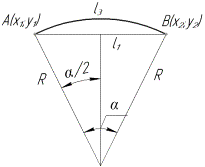
Оскільки рух буває прямолінійним і обертальним (повне коло або рух по
дузі), то знайдемо довжини елементарних переміщень для цих випадків (рис. 2):
|
Прямолінійний
рух
|
Рисунок 2 |
|
Повне коло
де i,j – координати центра кола відносно початку руху; |
|
|
Рух по дузі
де
|
3 Визначення часу розгону
Враховуючи перехідні процеси час розгону становить трьом електромеханічним сталим двигуна:
|
|
Рисунок 3 – Розподіл подачі по х
та у |
|
де |
|
|
|
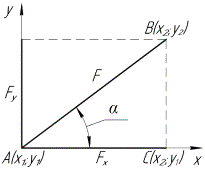
Розподіл подачі по осям х та у наведений на рис.
3.
В залежності від кута α значення подачі на
серводвигунах буде змінюватися. Двигун, який повинен набрати більшу швидкість
буде довше розганятися і відповідно затримувати загальне відпрацювання
імпульсів, тому при розрахунках для кожного переходу шукаємо найбільшу
швидкість з двох двигунів.
![]()
![]()
![]()
![]()
![]()
![]()
Підставляючи всі ці значення ф формулу часу розгону, отримаємо:
![]()
Момент опору залежить від сили різання та діаметру інструменту може бути розрахований за відомою формулою:
![]()
4 Визначення
часу гальмування

![]() знаходимо за аналогічними співвідношеннями подачі:
знаходимо за аналогічними співвідношеннями подачі:
![]()
![]()
![]() максимальний момент інерції по
відповідній осі. Його значення знаходимо експериментальним шляхом, а саме:
максимальний момент інерції по
відповідній осі. Його значення знаходимо експериментальним шляхом, а саме:
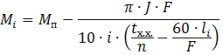
Вимірюємо
секундоміром час (![]() ) руху робочого органу верстату на холостому ході (
) руху робочого органу верстату на холостому ході (![]() ) по одній осі (з т. А у т. Б, далі з т. Б у т. А і т.д. n
раз). Чим більше разів робочий орган розганяється і
гальмує тим точніший буде результат. Зрештою, матимемо:
) по одній осі (з т. А у т. Б, далі з т. Б у т. А і т.д. n
раз). Чим більше разів робочий орган розганяється і
гальмує тим точніший буде результат. Зрештою, матимемо:
5 Визначення
загального часу
![]()
Якщо ![]() (розгін), тоді:
(розгін), тоді: ![]()
Якщо ![]() (рівномірний рух), тоді:
(рівномірний рух), тоді: ![]()
Якщо ![]() (гальмування), тоді:
(гальмування), тоді: ![]()
Сумарний час переміщень, відповідно складатиме: ![]()
Література
1. Соколовский Г. Г., 2006, Электроприводы
переменного тока с частотным регулированием.
2. Москаленко, В.В., 2007,
Электрический привод. − 2-е изд.
3. Чиликин М. Г., Сандлер А. С., 1981,
Общий курс электропривода. − 6-е изд.