Аканова Ж.Ж.,
Муратов А., Кайнарбеков А., Сарыпбеков
М.
г Алматы, Республика Казахстан, КУПС
КИНЕТОСТАТИЧЕСКОЕ ОБОСНОВАНИЕ ПАРАМЕТРОВ ШАГАЮЩЕГО КОЛЕСА С
УПРУГИМИ СПИЦАМИ
Из устройства шагающего колеса с
упругими спицами, видно что точность прямолинейного движения центра ступицы при
перекатывании его по ровной поверхности дороги, зависит от жесткости пружины
упругой части спицы. Жесткость пружины С
равна:
![]() ;
;
где ![]() вес транспортного средства, падающего на одно колесо;
вес транспортного средства, падающего на одно колесо;
![]() угол наклона спицы к опорной поверхности;
угол наклона спицы к опорной поверхности;
![]() величина деформации пружины под действием нарастающей силы
величина деформации пружины под действием нарастающей силы ![]() .
.
Величина (рисунок 1) деформации
пружины Х определяется исходя из точности прямолинейного движения центра
ступицы, и не зависимосит от
действующей силы ![]() , т. е:
, т. е:
![]() ;
;
где ![]() первоначальная длина спицы (
первоначальная длина спицы (![]() ).
).
![]() просвет (
просвет (![]() ).
).
Сила, вызывающая деформацию пружины,
изменяется в зависимости от угла наклона спицы к поверхности опоры, т.е. не
гарантировано существование между указанными параметрами линейной зависимости [1].
Поэтому в зависимости от изменения угла наклона спицы ![]() вычисляется величина
деформации пружины Х и величина проекции силы веса
вычисляется величина
деформации пружины Х и величина проекции силы веса ![]() независимо:
независимо:
 (1)
(1)
Отношение этих параметров показывает
жесткость пружины упругой части спицы:
![]() (2)
(2)
Получается нелинейная жесткость
пружины. Это насколько отличается от линейной жесткости обычной пружина, зависит
от количества спиц. Поэтому в начале рассмотрим шести спицевое колесо.
Для шести спицевого колеса:
![]()
начальный угол наклона спицы к опорной плоскости ![]()
В этом
положении дробь (2) неопределенна, т.е. ![]() , так как из (1)
, так как из (1) ![]() больше нуля, при
больше нуля, при ![]() При отсутствии
деформации деформирующая сила существует.
При отсутствии
деформации деформирующая сила существует.
Это показывает,
что пружина должна иметь первоначальное сжатие осуществленное устройством
спицы, причем начальное сжатие ![]()
![]()
Определим
значения Х и Р из (1) и построим график Р=Р(Х) для значений ![]() и
и ![]() (Рисунок 1).
(Рисунок 1).
При ![]()
при ![]()
при ![]()
при ![]()
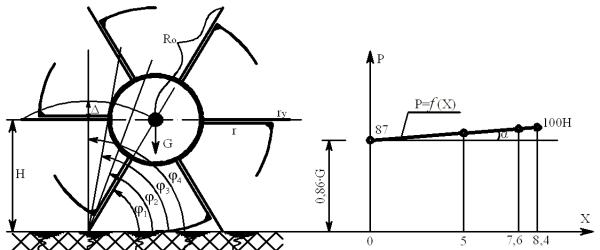
Рисунок. 1.- К выбору жесткости
пружины
Как видно (рис. 1) из графика
зависимости Р=Р(Х) без ущерба для
практики точностью можно считать, что между деформацией пружины и деформирующей
нагрузкой существует линейная зависимость [2]. Поэтому для упругой части спицы
можно использовать предварительно зажатую винтовую пружину. Причем
первоначальное сжатие равно:
![]()
В вертикальном положении спицы:
![]()
т.е. пружина деформируется на величину ![]() , т.е:
, т.е:
![]()
Из указанных равенств следует:
![]()
На специальной
установке нужно подобрать пружину с жесткостью, обеспечивающую первоначальное
усилие ![]() и конечное
и конечное
![]()
Теперь
рассмотрим четырехспицевое колесо (рисунок. 2). Для этого колеса:
![]() ;
;
![]() ;
;
Аналогично
рассмотрим положения спицы от
![]()
![]() .
.
Пусть ![]()
При![]()
![]()
![]()
При![]()
![]()
![]()
При![]()
![]()
![]()
При![]()
![]()
![]()
Как видно (рис. 2), из графика зависимости Р=Р(Х) четырехспицевое колесо дает
больше погрешности по прямолинейности движения центра ступицы по сравнения с
шестиспицевым колесом. Но оно отличается значительной простотой конструкции.
Поэтому использование той или иной конструкции колеса зависит от конкретных
дорожных условий. Четырехспицевое колесо, как показывает лабораторные
испытания, хорошо рекомендует себя для податливых грунтов как песок, снег,
болото.
Все известные
конструкции шагающих колес сравниваются с пневоколесом при равных дорожных
условиях по трем показателям – комфортность езды, проходимость и энергозатраты
на передвижение условиях и бездорожья.

Рисунок. 2. К определению жесткости
пружины колеса.
Литература:
1. Муратов А., Сазанбаева Р.И. Сравнительный анализ кинематики колеса с ободом и шагающего колеса в условиях бездорожья //Тр. Второй Междунар.науч.-практ.конф. «Транспорт Евразии: взгляд в ХХ1 век». – Алматы: Каз АТК, 2002.
2. Муратов А.М., Сазанбаева Р.И., Мусин Т.О. Синтез строения замкнутых кинематических цепей без избыточной связи // Вестник. КазАТК. 2001г.