К.ф.-м.н.
Докукова Н.A.,
к.ф.-м.н. Конон П.Н.
Белорусский государственный университет, Минск,
Беларусь
Кинематические закономерности плоского движения многозвенного
роботизированного устройства
Рассматривается плоское
движение шагающего многозвенного устройства - прямоходящего
механизма [1]. Во многих странах с успехом разрабатывают и производят роботы, в
помощь ручному труду и для замены высокотехнологичной деятельности человека во
многих отраслях промышленности. Одним из важных аспектов в проектировании таких
сложных механизмов является исследование его кинематики и динамики [2 -
4] для обеспечения динамической устойчивости устройства, способного перемещаться
на двух конечностях на рисунке 1. Рассмотрим кинематические закономерности
перемещений шарнирно сочлененных звеньев прямоходящего робота, легко
программируемые в любы пакетах аналитических вычислений для воспроизведения
видео-файлов визуальной проверки полученных результатов теоретического
проектирования.
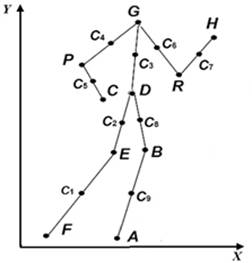
Рисунок 1 - Схема плоского
движения многозвенного роботизированного устройства
Математическая модель кинематических
законов движения звеньев и шарниров роботизированного
устройства в плоскости Oxy
представима
в параметрическом виде в зависимости от временной переменной t,
например следующим образом:
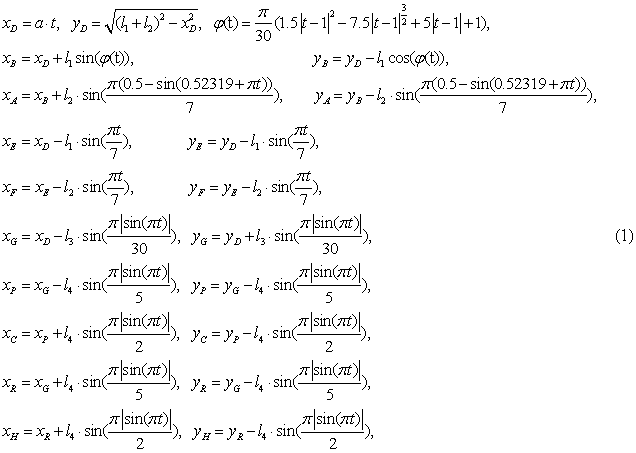
где ![]() м/с -
скорость движения точки D механизма; l1=6.4
см, l2=6.3см,
l3 = 10.5 см, l4
= 6.0 см -
длины звеньев. Годографы законов движений (1) представлены на графиках рисунка
2.
м/с -
скорость движения точки D механизма; l1=6.4
см, l2=6.3см,
l3 = 10.5 см, l4
= 6.0 см -
длины звеньев. Годографы законов движений (1) представлены на графиках рисунка
2.
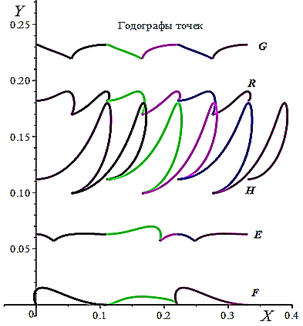
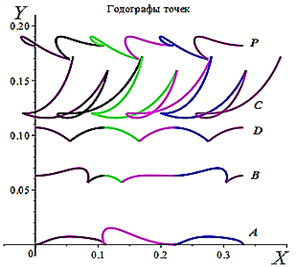
Рисунок 2 - Графики
годографов точек в плоскости Oxy с течением времени
Из анализа движения прямоходящего многозвенного роботизированного
устройства получены уравнения, описывающие движение шагающего механизма,
проведены расчёты, исследована его кинематика, построены графики годографов
всех точек в плоскости Oxy
относительно параметра времени. Формулы законов движения многозвенного
устройства легко программируются в среде компьютерных прикладных программ любых
символьных вычислений, из них формируются gif-файлы, скриншот которых
представлен на рисунке 3. Написанная программа в виде анимационного файла в
пакете прикладных программ системы компьютерной алгебры иллюстрируют и
верифицируют процесс движения шагающего механизма.
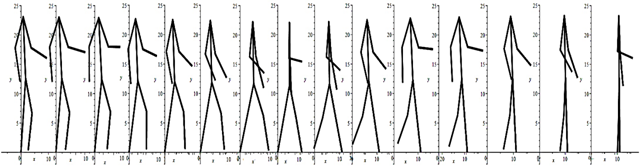
Рисунок 3 - Скриншот анимационного файла визуализации плоского движения по формулам законов (1)
многозвенного роботизированного устройства
Литература:
1.
Накано Э. Введение в робототехнику.– М.−
1988.
2. Мартыненко М.Д., Докукова Н.А., Бойко Л.И. // О колебательных процессах в механических системах/ ИФЖ.- 1999.- Т 72.- № 3.- С. 491-494.
3. Докукова Н.А.,
Кафтайкина Е.Н., Конон Н.П. О синхронных колебаниях многоэлементных линейных
динамических систем// MISPC X «Conduct of modern science». Mathematics.
Physics. Modern information technologies.− 2014.− V. 21.−
P. 25-32.
4. Dokukova
N.A., Kaftaikina E.N., Konon N.P. N sync metronomes on a vibrating horizontal
platform// ISPC XIII «Cutting-Edge Science − 2017». Mathematics.- Sheffield, S Yorkshire, England.− 2017.−
V. 5.- P. 38-43.