Дев’яткін
К.Є., Сніжко Є.М.
Дніпропетровський національний університет
Система класифікації цифрових зображень
транспортних засобів
Задачею
даної роботи є розробка та дослідження алгоритмів для виділення та класифікації
транспортних засобів (ТЗ) на цифрових зображеннях. Задача має комплексний
ієрархічний характер і включає ряд
етапів: сприйняття поля зору, сегментація, нормалізація виділених
об'єктів, розпізнавання, математична обробка даних. Досліджено декілька
алгоритмів розпізнавання: текстурна
сегментація, корекція тла, виділення границь тощо.
Алгоритм виділяє області за їх текстурами, потім вирішується задача сегментації двох типів зображень
транспортних засобів: з тінню та без неї. Для даного методу не потрібен
додатковий кадр – тло. Наступним кроком йде бінаризація. На цьому кроці
найважливіше правильно визначити коефіцієнт бінаризації. Далі слід прив’язатися
до геометричних параметрів усіх розпізнаних об’єктів та зробити висновок щодо
присутності транспортного засобу у кадрі. На
практиці такий алгоритм виявляється чутливим до зміни яскравості, особливо для об’єктів
з тінню..
Використані також способи виявлення транспортних засобів завдяки обчисленням міжкадрової різниці або
різниці тла й поточного кадру. Знаходження тла утруднене рухом об'єктів у зоні
контролю й зміною зовнішніх умов. У випадку щільного потоку транспортних
засобів і при швидко мінливих зовнішніх умовах (дощ, сніг) дані способи
працюють не ефективно.
Більш ефективний спосіб виявлення
транспортних засобів включає одержання
кадрів, обчислення різниці між кадрами, бінаризацію із заданим порогом,
морфологічні операції, (обчислення оператора Собеля для визначення границь
об'єкта. В способі виявлення транспортних засобів у якості тла фіксують перший кадр, при кожному наступному кадрі
коректують тло за формулою

де GF(i, j) - яскравість крапки тла з координатами i, j після коректування; GF-1(i,
j) - яскравість крапки тла з координатами i, j до коректування; ![]() а - коефіцієнт корекції тла; GТ
(i, j) - яскравість крапки поточного кадру з координатами i, j. Здійснення пропонованого
способу дозволяє підвищити точність виявлення транспортних засобів при істотних
змінах в області робочої сцени, обумовлених часом доби, погодними умовами,
появою нових стаціонарних об'єктів у зоні контролю. Для роботи способу
використовується послідовність кадрів, одержуваних стаціонарною монохромною
телекамерою. У пам'яті для кожного кадру формується двовимірний масив елементів GТ(i, j) розмірністю Nx×Ny.
Для кожного пікселя зображення в масиві зберігається значення яскравості від 0
до kmax (0 - білий, kmax - чорний). Nx, Ny
залежать від роздільної здатності телекамери й плати відеозахвату, a k max -
визначається розрядністю аналого-цифрового перетворювача. Для розглянутого
способу kmax=255.
а - коефіцієнт корекції тла; GТ
(i, j) - яскравість крапки поточного кадру з координатами i, j. Здійснення пропонованого
способу дозволяє підвищити точність виявлення транспортних засобів при істотних
змінах в області робочої сцени, обумовлених часом доби, погодними умовами,
появою нових стаціонарних об'єктів у зоні контролю. Для роботи способу
використовується послідовність кадрів, одержуваних стаціонарною монохромною
телекамерою. У пам'яті для кожного кадру формується двовимірний масив елементів GТ(i, j) розмірністю Nx×Ny.
Для кожного пікселя зображення в масиві зберігається значення яскравості від 0
до kmax (0 - білий, kmax - чорний). Nx, Ny
залежать від роздільної здатності телекамери й плати відеозахвату, a k max -
визначається розрядністю аналого-цифрового перетворювача. Для розглянутого
способу kmax=255.
Наступна послідовність дій виконується для кожного кадру: корекція тла; обчислення
різниці поточного кадру й тла: бінаризація різниці та морфологічні операції. Бінаризація потрібна, щоб позбутися малих
деталей які залишились від тла, а морфологічні операції - для об’єднання окремих частин в один об’єкт та видалення деталей, котрі
не можуть бути транспортним засобом.
Розпізнані транспортні засоби потрібно було класифікувати. Обрано чотири
класи, а саме: легкові транспортні засоби (ЛТЗ); маршрутні транспортні засоби
(МТЗ); вантажні транспортні засоби (ВТЗ); інші транспортні засоби (ІТЗ). Для
розпізнаного транспортного засобу була розрахована швидкість та інші параметри.
В кінці експерименту розрахована густина потоку машин, вся інформація виведене у Excel-файл.
Даний метод показав гарні результати при
постійних змінах яскравості знімку, однак повільно працює, тому потрібно шукати
компроміс між швидкістю та якістю.
Далі потрібно вибрати область
інтересу та застосувати до зображення один з методів виділення границь [1-5]. Найкращі
результати дає метод Канні, але слід зауважити, що це самий повільний метод.
Зважаючи на це можна звернути увагу на метод Собеля, котрий також дав
непоганий результат. . Для зображень з тінню жодний з методів не тільки не дає
змоги позбавитися тіні, а навпаки чітко окреслює її. Не дають очікуваного
результату і морфологічні операції (ерозія, закриття, нарощування та ін.). Однак
для зображень без тіні метод виділення границь на практиці виявився самим
вдалим, бо він не тільки достатньо швидкий але і більш стабільний при зміні
яскравості.
Результати обробки та класифікації транспортних засобів
В ході експериментів
контрольна партія знімків (1000) оброблялась по черзі трьома алгоритмами. У
таблиці 1 відображені результати
кількості правильно розпізнаних транспортних засобів, поділених на дві
групи: з тінню (500) та без тіні (500).
Результати вірної класификації зображепнь Таблиця 1
|
|
Аналіз текстур |
Корекція тла |
Виділення границь |
|
з тінню (500) |
221 (44,2%) |
469 (93,8%) |
93 (18,6%) |
|
без тіні (500) |
416 (83,2%) |
493 (98,6%) |
490 (98%) |
|
час обробки |
3,5 с |
4 с |
1,5 с |
Як видно з таблиці, щоб отримати збалансовану
за швидкістю та якістю програму, потрібно використовувати обидва алгоритми (з
використанням корекції тла та на основі виділення границь), причому обробляти
зображення без тіні другим алгоритмом, а перший підключати тільки за наявністю
тіні.
На рис.1
показаний графік класифікації транспортних засобів Всі розпізнані транспортні
засоби розпалися на кластери в залежності від площі S та величини k – різниці між довжиною та шириною транспортного засобу. Перший
клас значно відокремлюється від
інших. Другий клас є найвиразнішим хоч він візуально і поділився на два
підкласи через те, що маршрутки типу Mercedes довші за інші типи. Третій клас
представлений відразу чотирма кластерами: перший, - це маленькі фургони або
великі позашляховики; другий кластер (площа від 17000 до
24000), представлений малотоннажними вантажівками (Газелі та ін.); третій кластер - це
вантажівки типу КРАЗ, які мають велику площу у порівнянні з іншими
транспортними засобами; четвертий кластер - рефрижератори та довгомірні
вантажівки. До четвертого класу відносяться всі інші транспортні
засоби, які не ввійшли до жодного з трьох попередніх класів.
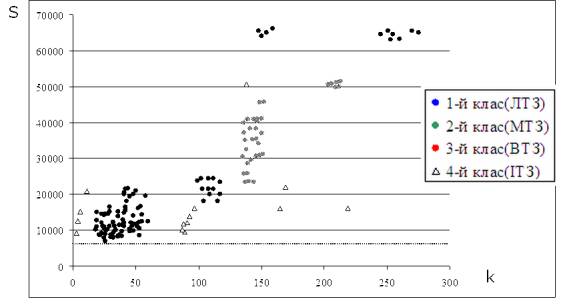
Рис.1. Графік класифікації
транспортних засобів
В процесі виконання даної роботи було зроблено та опрацьовано дві тисячі
фотографічних зображень дорожнього полотна з частотою 2,5 кадри за секунду. До
цих кадрів потрапило 440 транспортних засобів, серед яких: 264 ЛТЗ, 70
маршрутних ТЗ, 65 ВТЗ та 41 інших (серед яких тролейбуси, вантажівки з
причепами, та деякі автобуси). Якість розпізнавання склала 91%. Програма змогла
розпізнати 400 ТЗ, серед яких: 262 ЛТЗ, 60 МТЗ, 55 ВТЗ та 23 ІТЗ. За класами
нерозпізнані ТЗ складають відповідно:ЛТЗ – 0,5%, МТЗ і ВТЗ– по 2,2%, ІТЗ –
4,1%. Найбільший внесок привносять інші транспортні засоби, найчастіше це
тролейбуси котрі мають дуже великі габарити і через це не завжди потрапляють
цілими у кадр.
Висновки та подальші перспективи
Результатом виконаної роботи стала комп’ютерна програма
яка розпізнає та класифікує транспортні засоби на фотографічних зображеннях. Розроблені та експериментально
перевірені алгоритми обробки та класифікації зображень ТЗ. Під час дослідження
виявилося, що у якості параметрів класифікації можна прийняти розміри
транспортних засобів та їх площу. Програма показала такі результати: із 440 ТЗ
було розпізнано та класифіковано 400. У
різних категоріях транспортних
засобів в залежності від класу процент розпізнання такий: легкові транспортні
засоби 99,5%, маршрутні транспортні засоби 86%, вантажні транспортні засоби
85%. Для покращення якості розпізнавання слід аналізувати додаткові геометричні
характеристики ТЗ.
Програма може бути застосована в інших галузях, де основним критерієм
класифікації зображень виступає площа об’єктів, наприклад, для біомедичних або
мікробіологічних зображень.
Список літератури
1.
Р. Гонсалес, Р. Вудс Цифровая обработка изображений: пер.
с англ.. под ред. П.А.Чочина. – М.: Техносфера, 2005. – 1072 с.
2.
S. Nixon, S. Aguado Feature Extraction and Image Processing. – Oxford: Newnes, 2002. – 360p.
3.
Jahne B. Digital Image Processing. – Heidelberg: Springer, 2002. – 585 p.
4.
Amit Y. 2D Object Detection and
Recognition. – London: The MIT Press, 2002. – 325 p.
5.
Ardeshir A. 2-D and 3-D Image
Registration. – New Jersey: Wiley-interscience, 2005. – 280 p.
6.
Ray Liu K.J. Pattern recognition and
image preprocessing. – New York: Marcel Dekker, 2002. – 719 p.