Технические
науки/9. Авиация и космонавтика
м.т.н Романёнок С.Н., Тюпин
Р.Л.
Математическая
модель низкочастотной вибрации двигателя вертолёта
С учётом свойств объекта исследования и особенностей
распространения вибрации в низкочастотном диапазоне, представим ротор
газотурбинного двигателя в виде горизонтально расположенного жёсткого ротора,
обладающего осевой симметрией и вращающегося с угловой скоростью ωrt в упругих опорах О1 и О2
с коэффициентами жёсткости с1 и с2 соответственно.
Главный осевой момент инерции обозначим Jx, экваториальные Jy и Jz. Общая масса ротора – mrt. В опорах учитываются силы вязкого
трения с коэффициентами n1 и n2. С учётом конструктивных особенностей
будем полагать, что перемещения оси вращения вдоль оси ОХ на одной из опор
отсутствует.
Для нахождения уравнений вынужденных колебаний
воспользуемся уравнением Лагранжа.
![]() (1)
(1)
Общая кинетическая энергия системы является суммой
кинетической энергии вращения и кинетической энергии перемещения:
![]() (2)
(2)
Общая потенциальная энергия работы сил упругости:
![]() (3)
(3)
Общая диссипативная энергия работы сил трения:
![]() (4)
(4)
Вынуждающие силы статического и динамического
дисбаланса описываются следующей системой:
(5)
где Fi – вектор центробежной силы
действующий на i-й элемент ротора;
mi – масса i-го элемента ротора;
ri – расстояние от центра масс элемента до оси вращения
ротора;
Mi – вектор момента центробежных сил i-го элемента относительно главной
оси инерции ротора, перпендикулярного оси вращения;
eст – эксцентриситет ротора;
l – расстояние массы до опор ротора;
ωrt – круговая частота вращения ротора.
Присвоим значения обобщённым координатам и запишем
уравнения вынужденных колебаний:
q1=x q2=y q3=z q4=φ q5=ϒ q6=ψ
Тогда для q1=x:
a)
![]() =
= ![]() =
= ![]()
b)
![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
первое уравнение системы в виде:
![]() +
+![]() =
=![]() (6)
(6)
Для q2=y:
a)
![]() =
= ![]() =
= ![]()
b)
![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
второе уравнение системы в виде:
![]() +
+![]() =
=![]() (7)
(7)
Для q3=z:
a)
![]() =
= ![]() =
= ![]()
b)
-![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
третье уравнение системы в виде:
![]() +
+![]() =
=![]() (8)
(8)
Для q4=φ:
a)
![]() =
= ![]() =
= ![]()
b)
-![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
четвёртое уравнение системы в виде:
(9)
Для q5=ϒ:
a)
![]() =
= ![]() =
= ![]()
b)
-![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
пятое уравнение системы в виде:
(10)
Для q6=ψ:
a)
![]() =
= ![]() =
= ![]()
b)
-![]() =
= ![]() =
= ![]()
c)
![]() =
= ![]() =
= ![]()
Запишем
шестое уравнение системы в виде:
(11)
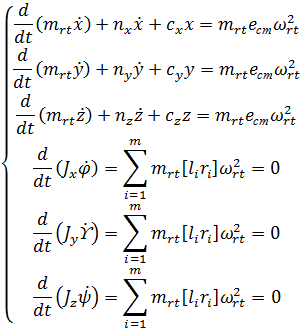
Таким
образом, для всей системы в целом:
(12)
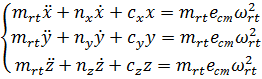
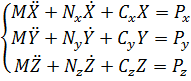
С учётом принятых допущений и особенностей имеющегося
оборудования упростим и приведём систему к виду:
(13)
Для сложных систем, которые имеют несколько источников
низкочастотной вибрации и конечное число степеней свободы n, подвергающихся воздействию внешних
гармонических возбуждающих сил, справедлива общая форма представления в
матричной форме [1, 2, 3, 29]:
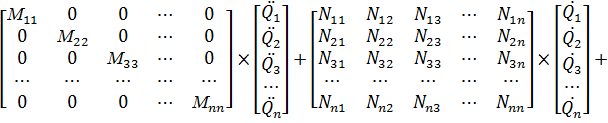
(14)
Введём
обозначения:
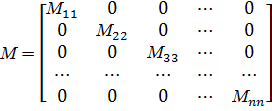
М –
диагональная инерциальная матрица:
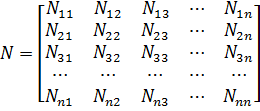
N – матрица коэффициентов демпфирования:
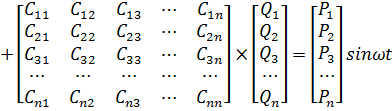
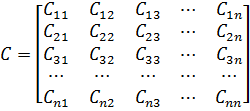
C – матрица коэффициентов жёсткости:
![]() – вектор-столбцы перемещений i-той формы и
первой и второй производных соответственно:
– вектор-столбцы перемещений i-той формы и
первой и второй производных соответственно:
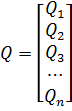
P – вектор-столбец обобщённых возмущений:
Используя
введённые обозначения, приведём выражение (14) к виду:
![]() (15)
(15)
С учётом
2.14 и 2.15 запишем:
 (16)
(16)
Особенности элементов диагностируемой системы, их
взаимодействий описываются элементами матриц М, N, С. Характеристики возбуждающих сил
задаются вектором Р.
Матрица N учитывает диссипативные силы действующие в
системе. Для данного случая демпфирование принимается линейнозависимым.
Коэффициенты демпфирования Nij
зависят как от демпфирования в опорах, так и от демпфирования газовоздушного
потока, рассчитываются и уточняются исходя из характера взаимного влияния
источников вибрации и с учётом особенностей конструкции.
Элементы матрицы С представляют собой усилия
соответствующие перемещению типа i обусловленным равным единице
перемещением типа j. Для линейно упругих систем с
малыми перемещениями матрица жёсткости является симметричной.
Для реализации динамических моделей пригодны методы
численного интегрирования дифференциальных уравнений (метод Эйлера, метод
Рунге-Кутта, метод Адамса и др.)
Отклик модели без дефектов на возбуждающее воздействие
представлен на рисунке.
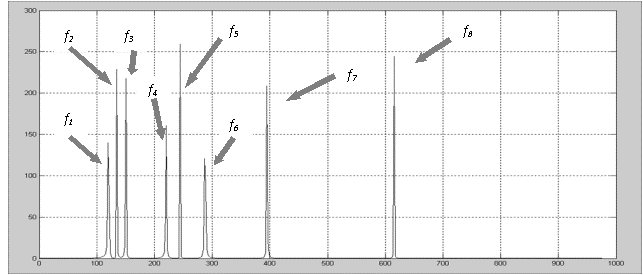

f1 – привод гибкого валика; f2 – СТГ-3; f3 – свободная турбина ТВ3-117; f4 – вторая ступень редуктора АИ-9В; f5 – турбокомпрессор ТВ3-117; f6 – главный привод ТВ3-117; f7 – первая ступень редуктора АИ-9В; f8 – ротор АИ-9В.
Литература
1. Ден Гартог Дж.
Механические колебания. - М.: Физматгиз 1964г. - 420 стр.
2. Берестнев О.В., Гоман
А.М., Ишин Н.Н. Аналитические методы механики в динамике приводов. – Минск.:
Наука и техника, 1992. – 238 с.
3. Тимошенко С.П. и др.
Колебания в инженерном деле // Перевод с англ. Л.Г. Корнейчука; Под редакцией
Э.И. Григолюка. – М.: Машиностроение, 1985. – 472 с.
4. Колесник И.В. Устранение
вибрации машин. – М.: Машгиз 1960г. – 650 стр.
5.
Генкин М.Д.,
Соколова А.Г. Виброакустическая диагностика машин и механизмов.- М.:
Машиностроение, 1987.-283с.