Экспериментальные исследования динамики инерционных
бесступенчатых передач
Основная
задача экспериментальных исследований заключалась в проверке положений
разработанной теории инерционных бесступенчатых передач повышенной нагрузочной
способности [1,2].
Для
проведения экспериментальных исследований в научно-исследовательской
лаборатории Южно-Уральского государственного университета был спроектирован и
изготовлен опытный образец инерционной бесступенчатой передачи. Фотография
экспериментального стенда представлена на рис.1, а его принципиальная схема изображена
на рис.2.
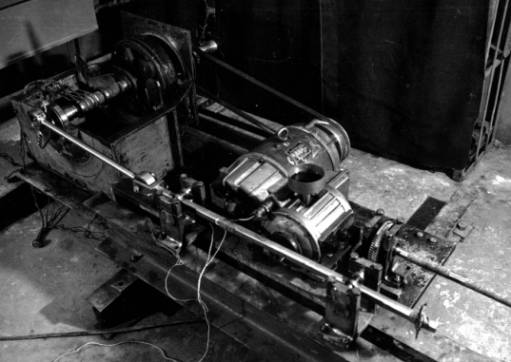
Рис.1. Фотография экспериментального стенда
Экспериментальный
стенд включает двигатель Д с тиристорным управлением, позволяющим менять
угловую скорость двигателя в пределах
от 0 до 200 ![]() , клиноременную передачу с передаточным отношением
, клиноременную передачу с передаточным отношением ![]() , импульсный механизм Левина с ведущей эпициклической
шестерней и ведомой солнечной шестерней, центральный кривошипно-ползунный
механизм, зубчатую передачу и нагружающее устройство Т.
, импульсный механизм Левина с ведущей эпициклической
шестерней и ведомой солнечной шестерней, центральный кривошипно-ползунный
механизм, зубчатую передачу и нагружающее устройство Т.
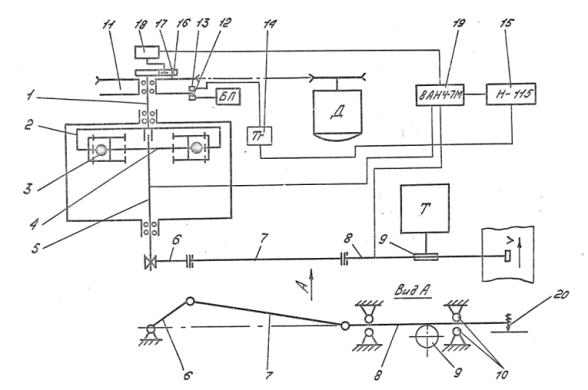
Рис.2. Принципиальная схема
экспериментального стенда
На
выходном валу 1 импульсного механизма установлен эпицикл 2, входящий в
зацепление с неуравновешенными «плавающими» сателлитами 3, которые, в свою
очередь, входят в зацепление с солнечной шестерней 4, жестко закрепленной на
промежуточном валу 5. На промежуточном валу также закреплен кривошип 6
центрального кривошипно-ползунного механизма. Конструкция предусматривала возможность
ступенчатого изменения радиуса кривошипа. Значение радиуса выбиралось из ряда:
0,058; 0,063; 0,078; 0,083; 0,103 и 0,118 м. К кривошипу одним концом
присоединен шатун 7. Другой конец шатуна шарнирно прикреплен к ползуну 8. Для
удобства проведения экспериментальных исследований ползун выполнен в виде зубчатой
рейки, входящей в зацепление с зубчатой шестерней 9, установленной на валу
электромагнитного порошкового тормоза ПТ. Применение порошкового тормоза в
качестве нагружающего устройства позволяет простым образом осуществлять
двустороннее сопротивление на ползуне.
С целью
уменьшения влияния сил трения ползун (зубчатая рейка) установлен на роликовых
опорах 10.
Фотография
импульсного механизма Левина представлена на рис.3. На фотографии виден
ленточный токосъемник.

Рис.3. Фотография импульсного механизма Левина
Экспериментальный
стенд работает следующим образом.
Вращение
приводного двигателя передается через клиноременную передачу на выходной вал 1,
затем эпицикл 2, неуравновешенные сателлиты 3 . Инерционные силы вращающихся в
относительном движении сателлитов 3 создают знакопеременные импульсы
инерционного момента на промежуточном валу 5. При этом промежуточный вал
совершает знакопеременное вращение, которое через звенья кривошипно-ползунного
механизма 6, 7 и 8 передается на шестерню 9. При этом ползун 8 совершает
возвратно-поступательное движение. С увеличением силы сопротивления на ползуне
уменьшается амплитуда движения ползуна, меняется скорость обкатки грузовых
звеньев импульсного механизма. Происходит автоматическое изменение крутящего
момента. Движущее усилие на ползуне увеличивается. Трансформация момента
происходит на промежуточном валу импульсного механизма. В зависимости от силы
сопротивления на ползуне и положения кривошипа инерционная передача работает
или на режиме динамической муфты, или на режиме трансформации крутящего
момента, или на режиме заторможенного промежуточного вала импульсного
механизма.
В процессе
экспериментальных исследований замерялись следующие показатели:
1) средняя угловая
скорость входного вала 1;
2) вращающий момент
на входном валу 1;
3) вращающий момент
на промежуточном валу 5;
4) сила сопротивления
на ползуне 8;
5) перемещение
ползуна 8.
Позиции поставлены в
соответствии с рис.2.
Регистрация
средней угловой скорости входного вала проводилась фотоэлектрическим методом.
На входном валу был закреплен диск 11 с отверстием, расположенном на периферии.
Напротив отверстия с одной стороны диска устанавливалась лампочка 12 с блоком
питания БП, а с другой ─ фотодиод 13. Сигнал с фотодиода с помощью
триггера 14 преобразовывался в импульс и регистрировался на осциллографе 15 (Н-115),
отмечая один оборот входного вала.
Замер
вращающего момента на входном валу осуществлялся тензодатчиками при
использовании полумостовой схемы включения. Для исключения влияния поперечной
силы от натяжения приводных ремней на входном валу 1 жестко закреплены четыре
пластины 16. Вращение от шкива на входной вал передавалось через эти пластины с
помощью поводков 17. На пластины были наклеены тензодатчики, сигнал с которых
снимался с помощью концевого токосъемника 18 (ТРАК-1). Контакт в концевом
токосъемнике осуществлялся через ртутную амальгаму. Для усиления сигнала
использовался тензоусилитель 19 (8АНЧ-7М). Регистрация сигнала производилась с
помощью осциллографа 15 (Н-115).
Замер
вращающего момента на реакторе осуществлялся аналогичным образом. Отличие
заключалось лишь в использовании токосъемника ленточного типа.
Для
измерения силы сопротивления на ползуне также были использованы тензодатчики.
Схема наклейки тензодатчиков предусматривала компенсацию влияния поперечных
усилий от действия шестерни 9 и роликовых опор 10.
При
проведении экспериментальных исследований использовались тензодатчики 2ПКБ-10-200Х.
Тарировка тензодатчиков осуществлялась с помощью рычага с фиксированным плечом
и разновесов.
Регистрация
перемещения ползуна осуществлялась с помощью подпружиненного самописца 20,
закрепленного на ползуне. След самописца отмечался на бумаге, перемещаемой
лентопротяжным устройством. Скорость протяжки составляла 0,1 м/с. Такой способ
замера отличается простотой и, вместе с тем, позволяет получить наглядные
результаты, так как регистрация перемещения осуществляется в натуральную
величину.
При
работе экспериментального стенда возможны следующие основные режимы:
1. Режим
динамической муфты. На этом режиме звенья импульсного механизма вращаются как
одно целое с небольшими относительными колебаниями. Ползун кривошипно-ползунного
механизма совершает возвратно-поступательное движение с максимальной
амплитудой.
2. Режим
трансформации момента, при котором ползун совершает возвратно-поступательное
движение от одной мертвой точки до другой с наложенными высокочастотными
колебаниями. Существование такого режима можно предсказать теоретически.
Действительно, для импульсного механизма на основании теоремы о производной по
времени от момента количества движения относительно оси можно записать [3]
 ,
,
где ![]() ─ моменты
внешних сил относительно оси импульсного механизма.
─ моменты
внешних сил относительно оси импульсного механизма.
Рассматривая
установившийся режим работы, после интегрирования получим
Используя
теорему о среднем значении интеграла, найдем
![]() ,
,
где ![]() ─ среднее
значение момента двигателя;
─ среднее
значение момента двигателя;
![]() ─ среднее
значение момента сопротивления соответственно за положительную и отрицательную
части цикла.
─ среднее
значение момента сопротивления соответственно за положительную и отрицательную
части цикла.
Таким
образом, значение момента ![]() больше значения
момента
больше значения
момента ![]() на величину среднего
значения момента двигателя
на величину среднего
значения момента двигателя ![]() , поэтому даже при условии
, поэтому даже при условии ![]() возможен режим
работы, при котором ползун совершает возвратно-поступательное движение с
наложенными высокочастотными колебаниями. Периодический режим при этом
происходит за несколько оборотов грузового звена в относительном движении.
возможен режим
работы, при котором ползун совершает возвратно-поступательное движение с
наложенными высокочастотными колебаниями. Периодический режим при этом
происходит за несколько оборотов грузового звена в относительном движении.
Возможность
работы инерционных бесступенчатых передач без механизмов свободного хода на
описанном режиме значительно расширяет область их возможного применения. В
частности, становится возможным использование инерционных передач в выполнении
технологических операций, требующих полной амплитуды движения ползуна.
Наложенные высокочастотные колебания при этом будут способствовать
интенсификации технологических процессов.
3. Режим
трансформации момента, определяемый одним оборотом грузовых неуравновешенных
звеньев. На этом режиме ползун совершает колебания относительно определенного
положения. Средняя угловая скорость реактора для этого режима равняется нулю.
4.
Возможны устойчивые периодические режимы, определяемые несколькими оборотами
неуравновешенных грузовых звеньев, но без движения ползуна от одной мертвой
точки до другой с достижением этих точек. В этом случае скорее надо говорить не
о периодических, а о квази-периодических режимах работы инерционной передачи.
5. Режим
заторможенного ползуна. На этом режиме звенья кривошипно-ползунного механизма и
промежуточный вал импульсного механизма неподвижны, а приводной двигатель
вращается, что объясняется тем, что импульсный механизм имеет две степени
свободы. Полученные осциллограммы представленным на рис.4.
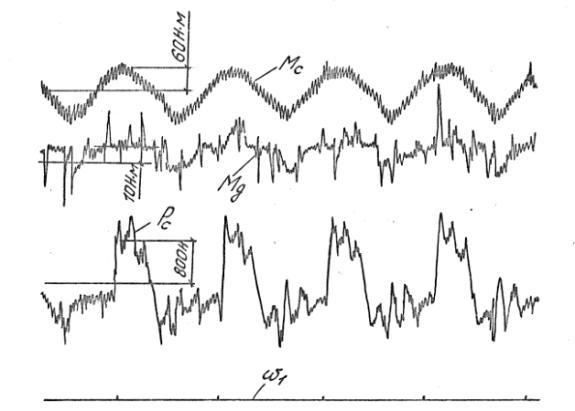
Рис.4. Осциллограммы
моментов ![]() ,
, ![]() и силы
и силы ![]() на режиме
на режиме
трансформации (![]() )
)
На рис.5
представлен график зависимости момента сопротивления ![]() от времени, построенный
по результатам теоретических исследований. Значения силы сопротивления
от времени, построенный
по результатам теоретических исследований. Значения силы сопротивления ![]() и
и ![]() принимались равными
принимались равными ![]()
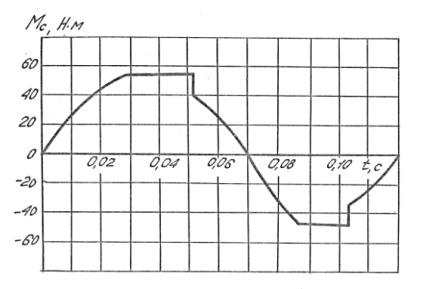
Рис.5. Теоретический график зависимости момента ![]() от времени
от времени
Сравнение
с экспериментальными данными (рис.4) показывает хорошую сходимость результатов
теоретических и экспериментальных исследований.
На рис.6
представлены осциллограммы момента ![]() и силы
и силы ![]() на режиме трансформации,
при котором средняя скорость ведущего вала составляла 40
на режиме трансформации,
при котором средняя скорость ведущего вала составляла 40 ![]() .
.
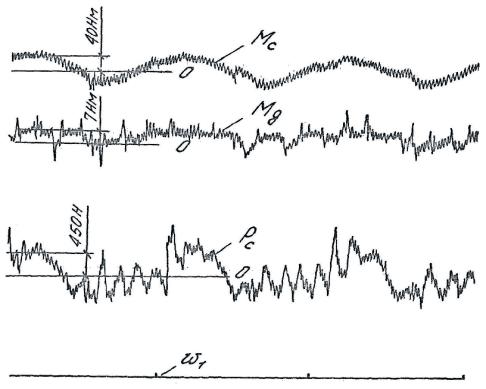
Рис.6. Осциллограммы
моментов ![]() ,
, ![]() и силы
и силы ![]() на режиме
на режиме
трансформации (![]() )
)
На рис.7
изображены осциллограммы, полученные на режиме трансформации момента при
различных значениях силы сопротивления ![]() . Средняя скорость ведущего вала не менялась и составляла 68
. Средняя скорость ведущего вала не менялась и составляла 68 ![]() .
.
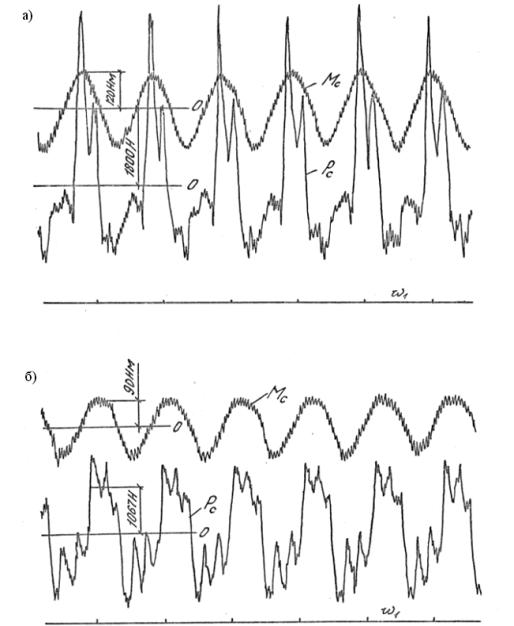
Рис.7. Осциллограммы
момента ![]() и силы
и силы ![]() на режиме
на режиме
трансформации
Анализ
осциллограмм показывает, что с увеличением силы сопротивления ![]() происходит
автоматическое увеличение момента
происходит
автоматическое увеличение момента ![]() . Для осциллограмм, изображенных на рис.7а), значения силы
сопротивления
. Для осциллограмм, изображенных на рис.7а), значения силы
сопротивления ![]() и
и ![]() принимались равными
принимались равными ![]() При этом среднее
значение момента
При этом среднее
значение момента ![]() за цикл составило 153
Нм. Значения момента на отрицательном импульсе брались по абсолютной величине.
Среднее значение момента
за цикл составило 153
Нм. Значения момента на отрицательном импульсе брались по абсолютной величине.
Среднее значение момента ![]() , подсчитанное теоретически, составило 132 Нм. Для
осциллограмм, представленных на рис.7б), было принято
, подсчитанное теоретически, составило 132 Нм. Для
осциллограмм, представленных на рис.7б), было принято ![]() Расчеты среднего
значения момента
Расчеты среднего
значения момента ![]() по теоретическим и
экспериментальным исследованиям дали следующие результаты:
по теоретическим и
экспериментальным исследованиям дали следующие результаты: ![]() Расхождение
результатов экспериментальных и теоретических расчетов лежит в пределах 15%.
Расхождение
результатов экспериментальных и теоретических расчетов лежит в пределах 15%.
Перемещение
ползуна. Регистрация перемещения ползуна производилась на всех основных режимах
инерционной передачи с рычажным механизмом на выходе.
Кривые,
характеризующие перемещение ползуна на режиме трансформации момента, при
котором на основное движение накладываются высокочастотные колебания,
представлены на рис.8 и 9. Рис.8 соответствует прямому ходу ползуна, рис.9 ─
обратному ходу.
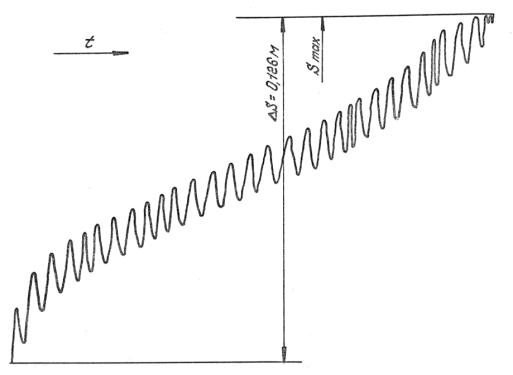
Рис.8. Перемещение
ползуна на режиме трансформации момента (![]() ).
).
Прямой ход
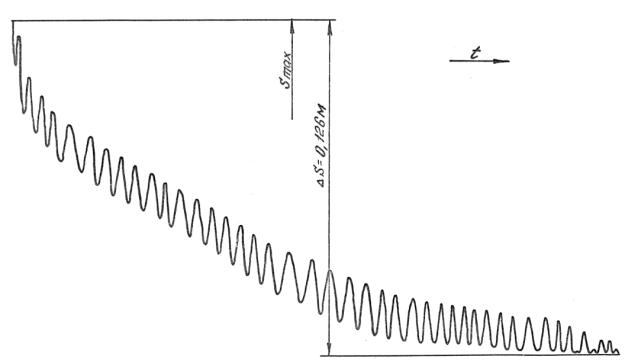
Рис.9. Перемещение
ползуна на режиме трансформации момента . (![]() ).
).
Обратный ход
Нетрудно
видеть, что амплитуда движения ползуна за одно высокочастотное колебание
является переменной и уменьшается по мере приближения к мертвым точкам.
Графики
перемещения ползуна при различных значениях силы сопротивления представлены на
рис.10. Средняя угловая скорость ведущего вала оставалась постоянной величиной.
Средняя угловая скорость ведомого вала импульсного механизма равнялась нулю.
Рисунку 10 соответствуют, таким образом,
режимы трансформации момента, при которых ползун совершает колебания
относительно некоторого фиксированного положения. С увеличением силы
сопротивления амплитуда колебаний ползуна уменьшается.
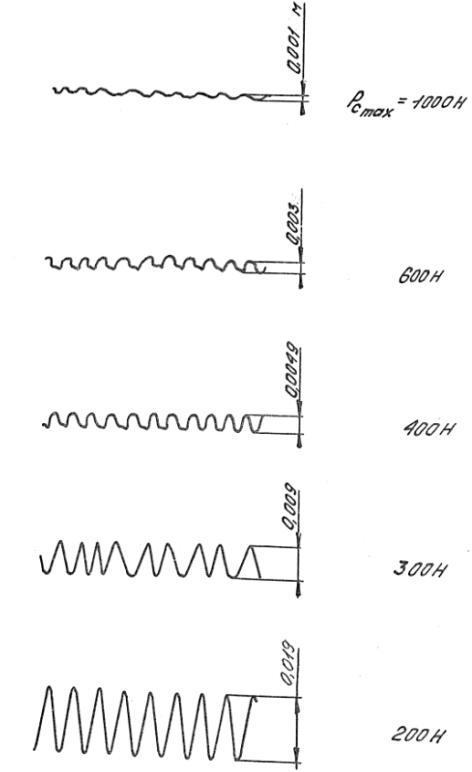
Рис.10. Перемещение
ползуна на режиме трансформации момента (![]() )
)
Литература:
1.
Алюков С.В. Перспективные
направления создания инерционных бесступенчатых передач повышенной надежности.
Материалы VII Международной
научно-практической конференции «Ключевые проблемы современной науки», 17
─ 25 апреля, 2012, София, «Бял ГРАД-БГ» ООД, 2012. Том 31, С. 71 ─
75.
2.
Алюков С.В.
Кинематические схемы инерционных бесступенчатых передач. Материалы VIII Международной научно-практической конференции
«Актуальные научные разработки», 17 ─ 25 января, 2012, София, «Бял
ГРАД-БГ» ООД, 2012. Том 20, С. 12 ─ 16.
3.
Алюков С.В. Динамика инерционного трансформатора вращающего момента без
механизмов свободного хода: Автореф. дис. …канд. техн. наук, ВПИ, 1983.