Талько А.А., Терехов
Д.Ю., Дроздов А.С.
Донской государственный
технический университет, Россия
Концепция построения модульного робота-спасателя
Введение. В свете развития
современного общества и науки такое направление робототехники, как модульные
роботы (МР), имеет большое значение и найдет широкое применение в различных
сферах жизни. Это могут быть как бытовые нужды, так и боевые задачи, как
мониторинг и исследование пространств с ограниченным доступом, так и
оперативное создание технологически обоснованных конструкций [1]. Малое
количество мировых разработок обуславливает актуальность исследования тематики
модульных роботов, разработку их различных конструкций и математических
моделей.
В данной работе рассмотрен один из возможных вариантов
построения модульного робота. Рассматривая концепцию робота спасателя, следует
выделить основные его функции. Он должен:
- проникать
в труднодоступные участки завалов;
-
анализировать окружающее пространство;
- иметь
возможность дать объемную картину исследуемого пространства.
Первое
требование как нельзя точно подводит нас к использованию модуля робота,
ограничением для проникновения которого является сечение одного модуля. Также
движение по сложным, ломаным поверхностям является одним из главных преимуществ
модульных роботов.
Второй пункт
требований говорит нам о необходимости использования датчиков. В зависимости от
условий рабочей зоны и требований к информации могут применяться различные
датчики, применение некоторых из них вместе не целесообразно. Учитывая, что для
эффективного движения модульного робота необходимо как минимум шесть звеньев
[2], а стоимость некоторых датчиков достаточно высока, при необходимости
использования их малого количества, мы приходим к выводу, что модули либо
должны иметь возможность для прикрепления навесного оборудования, либо должны
быть созданы специализированные модули.
Третий пункт требований тесно связан со
вторым. Это обусловлено тем, что при анализе пространства с одного из модулей в
большинстве случаев мы получаем плоское изображение, либо объемное с
существенными ограничениями. Используя идентичные датчики, но поместив их в
разные точки пространства, мы имеем возможность получить достаточно подробную и
точную картину объемного пространства. Информация со всех датчиков должна быть
собрана в одном месте и передана оператору, что подразумевает использование
внешнего узла связи робота. В данном случае видится эффективным использование внешней
ЭВМ для управления роботом и анализа его действий. Также требуется знать
местоположение каждого модуля, для чего можно использовать навесные или
встроенные «маячки». Использование внешнего управления позволяет нам
существенно упростить задачу реконфигурации роботов, разделения одного
модульного робота на нескольких меньших, или группировка ряда МР в одно целое.
Центральное управление позволяет существенно сократить время реконфигурации,
ввиду «знания» о положении и состоянии каждого модуля, вне зависимости от его
связи с остальными.
Подведя итоги, мы можем представить
концепцию робота спасателя. Она заключается в:
- использовании универсальных модулей с
разъемами под навесное оборудование или использованием специальных модулей;
- использовании связанной информационным
радио-каналом с каждым модулем внешней ЭВМ, которая обрабатывает полученную
информацию с модулей, обеспечивает управление и синтезирует цифровую объемную
карту рабочей зоны;
- использовании радио-маячков на каждом
модуле и внешних локаторов для точного пространственного позиционирования
каждого модуля.
Компоновка универсальных модулей схожа с
типичной компоновкой модулей – два блока, связанные шарниром. Для упрощения
модели будем использовать шарнир с одной степенью свободы.
В шарнире расположены
датчики угла перемещения, на основе которых строится управление каждым модулем.
Также эффективным будет использование тормозного устройства или угловых
фиксаторов, что обеспечит большую устойчивость при статических нагрузках. В
одном из звеньев установлен гироскопический датчик, который в сумме с
информацией об угле поворота шарнира даст полную информацию об ориентации
модуля в пространстве. Модули оснащены датчиками зацепления, сигнализирующими о
наличии сцепленных модулей и радио-маячками для определения координат модуля в
пространстве. Каждый модуль оборудован средством радиосвязи для передачи
информации с датчиков и навесного оборудования центральной ЭВМ и получения
управляющих данных.
В
разрабатываемом модульном роботе используются два основных типа информации – о конфигурации модулей, а также информация с
внешних сенсоров. Условно можно выделить две системы обработки информации, в
соответствии с ее видами. Это система контроля и управления конфигурацией
робота, а так же система управления движением робота. Эти две системы могут
быть как объединены в одну, так и реализованы в отдельных компонентах.
Задача
системы контроля и управления конфигурацией робота (СКУКР) состоит в том, чтобы
передавать каждому модулю управляющую информацию, собирать информацию о
выполнении управления, на основе прямых данных и показаний датчиков, составлять
данные о полученной в результате управления конфигурации, сравнивать итоговую конфигурацию
с заданной, формировать отчет о результате и возможных ошибках.
Задачи системы управления движение робота (СУДР)
более обширны и сложны. Эта система получает информацию от СКУКР и сенсоров
модульного робота, на основе которой она должна сформировать следующую
конфигурацию модульного робота, в соответствии с поставленной задачей, и
передать её СКУКР. В зависимости от задач управления меняется сложность
устройства СУДР. При наличии различных сенсоров и постановкой сложной задачи со
множеством неопределенностей требуется сложная, интеллектуальная СУДР.
Особенности данных систем позволяют разделить их
физически, связав лишь информационным каналом. Это позволяет увеличить
надежность и быстродействие в управлении модульного робота. СУДР реализуется на
отдельной платформе, чье быстродействие может значительно варьироваться в
зависимости от сложности задач и используемого программного и аппаратного
обеспечения. СКУКР в виду своей простоты и отсутствия интеллектуальности при
высоком быстродействии значительно менее требовательна к вычислительным
мощностям, на которых основана. При этом это система, распределена между всеми
модулями.
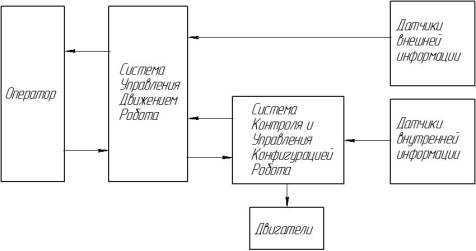
Рисунок
1 - Схема работы управляющих систем СУДР и СКУКР
Если информация о внешней среде, передаваемая в
СУДР может быть очень различна и требовать широкого канала связи, то информация
в СКУКР достаточно проста и может быть описана не длинными числами.
Для однозначного
определения положения обоих звеньев модуля относительно горизонта достаточно
иметь два гироскопических датчика в одном звене и датчик угла наклона звеньев
относительно друг друга. Учитывая, что конечное звено одного модуля наклонено
так же, как начальное звено следующего, то видно, что использование датчиков
углов поворота звеньев не требуется. Но все же в данной работе рекомендуется
оставить использование датчиков угла поворота. Кроме повышения точности
вычислений, что не видится необходимым в данных условиях, использование
дополнительных датчиков повышает надежность и упрощает поиск и компенсацию
поломок в роботе.
Заключение. В настоящее время развитие такого направления в
робототехнике, как модульные роботы, находится на начальном этапе. Существующие
проекты с научной точки зрения имеют большое значение. Созданы и опробованы
новые алгоритмы управления, продолжается изучение методов искусственного
интеллекта и принципов работы «разумом роя». Представленный принцип построения
модульного робота вносит разнообразие в существующие варианты реализаций и
имеет конкурентное преимущество в ряде реальных задач.
Литература
1. Вей-Мин Шень - Лаборатория
полиморфного робота. SuperBot. – URL: http://www.isi.edu/robots/superbot/
2. Тэвон Х., Ранасингх
Н., Барио Л., Вей-Мин Шень – Конфигурационная адаптация SuperBot
на наклонных поверхностях в режиме реального времени. – Международная
конференция Робототехники и Биомеханики. – Гуанчжоу., Китай – 13.12.2012.