Математическая модель новой рулевой трапеции автобуса «МАЗ»
Гурвич Ю. А., Лебедев Е.П.
Белорусский национальный технический университет
Под механико-математической моделью
понимается совокупность схемы рулевой
трапеции и формализованной связи (математического описания b=Ф(a,l1,..,lj,g1,..,gm), где b – угол поворота внешнего управляемого колеса машины; a - угол поворота внутреннего колеса; l1,…,lj – управляемые параметры; j – количество управляемых параметров; g1,…,gm – неуправляемые параметры; m- количество неуправляемых параметров.
Механико-математическая модель рулевой трапеции
+ β=
Ф(a,l1,..,lj,g1,..,gm) = Схема рулевой трапеции (рис. 1)
В литературе приведено большое число
различных конструкций рулевых трапеций, которые используются в машинах на
пневмоколесном ходу. Соответственно приведены
схемы этих рулевых трапеций. Известна только одна механико-математическая
модель – модель четырехзвенной неразрезной рулевой трапеции, впервые полученная
академиком Е.А. Чудаковым [1]. Для всех остальных конструкций рулевых трапеций
приведены только схемы, а математические описания β= Ф(a,l1,..,lj,g1,..,gm) отсутствуют.
Причём для каждой новой конструкции рулевой трапеции будет свое число звеньев и
своя совокупность конструктивных параметров.
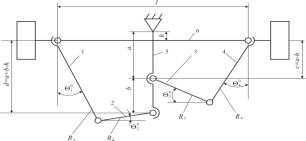
Рисунок 1. Схема несимметричной
шестизвенной рулевой трапеции автобуса «МАЗ», колеса которого находятся в нейтральном
положении
Постановка
задачи. Для расчета параметров шестизвенной рулевой трапеции изображенной на
рис.1 необходимо формализовать связь угла поворота наружного колеса ![]() от угла поворота
внутреннего колеса a и других управляемых и неуправляемых (конструктивных) параметров β=β(a,l1,..,lj,g1,..,gm).
от угла поворота
внутреннего колеса a и других управляемых и неуправляемых (конструктивных) параметров β=β(a,l1,..,lj,g1,..,gm).
На
рисунке 1 изображена новая шестизвенная рулевая трапеция автобуса «МАЗ» в
исходном положении. На этом рисунке пронумерованы длины стержней 1 – 5
соответственно через ![]() ,
, ![]() ,
, ![]() , а углы, определяющие направление стержней в начальном
положении (до поворота рулевого колеса), обозначены индексом «0»:
, а углы, определяющие направление стержней в начальном
положении (до поворота рулевого колеса), обозначены индексом «0»: ![]() .
.
При
повороте рулевого колеса автобуса углы ![]() станут другими, и появится
угол наклона стержня 5 к вертикали. Обозначим угол, определяющий направления стержней 1 – 5 в ненулевом
положении
станут другими, и появится
угол наклона стержня 5 к вертикали. Обозначим угол, определяющий направления стержней 1 – 5 в ненулевом
положении ![]() (Рис. 2).
(Рис. 2).
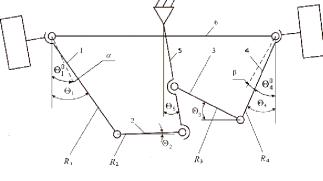
Рисунок 2. Схема несимметричной шестизвенной рулевой
трапеции автобуса «МАЗ», колеса которого находятся в повернутом положении
Штриховыми
линиями на рис. 2 показаны начальные положения стержней 1 и 5. При повороте
управляемого внутреннего колеса автобуса влево на угол ![]() стержни 1, 4 и 5 будут
вращаться против часовой стрелки, а углы
стержни 1, 4 и 5 будут
вращаться против часовой стрелки, а углы ![]() и
и ![]() будут соответственно равны:
будут соответственно равны: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Для
расчета параметров шестизвенной рулевой трапеции требуется определить зависимость
угла поворота наружного колеса ![]() от угла поворота внутреннего
колеса β=β(a,l1,..,lj,g1,..,gm) и
других конструктивных параметров, что эквивалентно определению
от угла поворота внутреннего
колеса β=β(a,l1,..,lj,g1,..,gm) и
других конструктивных параметров, что эквивалентно определению ![]() .
.
Определение начальных углов ![]() и
и ![]()
Определение ![]() . Рассматриваем часть трапеции левее стержня 5 (Рис. 1).
. Рассматриваем часть трапеции левее стержня 5 (Рис. 1).
Связи:  (1)
(1)
Система
(1) — это система уравнений с двумя неизвестными ![]() и
и ![]() . Из (1) исключим
. Из (1) исключим ![]() и обозначим
и обозначим ![]() . Получим:
. Получим:
 (2)
(2)
Возводим
в квадрат уравнения (2) и складываем их.
В результате получим:
![]() . (3)
. (3)
Введем
угол ![]() следующим образом:
следующим образом:
 ,
, ![]() ,
, ![]() .
.
Преобразуем
выражение (3):
 .
.
Определение ![]() . Рассматриваем часть трапеции правее стержня 5 (Рис. 1).
. Рассматриваем часть трапеции правее стержня 5 (Рис. 1).
Связи:  (4)
(4)
Из (4)
исключим ![]() и обозначим
и обозначим![]() . Получим:
. Получим:
 (5)
(5)
Исключим
из уравнений (5) ![]() , возведем их в
квадрат и сложим:
, возведем их в
квадрат и сложим:
![]() . (6)
. (6)
Введем
угол ![]() следующим образом:
следующим образом:
 ,
, ![]() ,
, ![]() .
.
Преобразуем
выражение (6):
 .
.
Определение зависимости ![]()
Определение
зависимости между ![]() и
и ![]() . Рассматриваем левую часть трапеции (левее стержня 5).
. Рассматриваем левую часть трапеции (левее стержня 5).
Связи:  (7)
(7)
Из выражений (7) исключим ![]() , возведем их в квадрат и сложим:
, возведем их в квадрат и сложим:
 (8)
(8)
Определение зависимости между ![]() и
и ![]() .
.
Связи:  (9)
(9)
Из (8)
исключим ![]() , возведем полученные уравнения в квадрат и сложим их:
, возведем полученные уравнения в квадрат и сложим их:
 (10)
(10)
Исключим ![]() из уравнений (8)
и (10). Уравнение (8) перепишем следующим
образом:
из уравнений (8)
и (10). Уравнение (8) перепишем следующим
образом:
 (11)
(11)
Введем
переменную амплитуду ![]() и
и ![]() :
:
![]() (12)
(12)
и примем,
что
![]() ,
,
![]() .
.
Тогда ![]() . (13)
. (13)
Преобразуем
уравнение (11) и выразим из него ![]() :
:
![]() .
.
Окончательно
![]() :
:
 (14)
(14)
Преобразуем
уравнение (10) таким образом:

или
(делим на ![]() ):
):
 (15)
(15)
Вводим ![]() и переменную
амплитуду
и переменную
амплитуду
![]() , (16)
, (16)
 ,
,
![]() .
.
Преобразуем
уравнение (15) и выразим из него ![]() :
:
![]() , (17)
, (17)
где ![]() определяется по
формуле (14).
определяется по
формуле (14).
В итоге зависимость
угла поворота наружного колеса ![]() от угла поворота
внутреннего колеса β=β(a,l1,..,lj,g1,..,gm)
примет вид:
от угла поворота
внутреннего колеса β=β(a,l1,..,lj,g1,..,gm)
примет вид:
 ,
,
где  ,
,
 .
.
Эта рулевая
трапеция содержит двенадцать конструктивных параметров: l,![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , в том числе восемь независимых–
, в том числе восемь независимых–![]() .
.
Литература
1. Чудаков Е. А. Теория
автомобиля. – М.: Изд. АН СССР, 1961.-462с.