УДК 629.113.006
Фиров Н.А., Шкуркин Д.В.
Научный
руководитель: д.т.н., проф. Финаев В.И.
ИССЛЕДОВАНИЕ И
РАЗРАБОТКА АЛГОРИТМОВ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ В ЗАДАЧАХ ПАРКОВКИ ТРАНСПОРТНОГО
СРЕДСТВА
В статье рассматривается
исследование и разработка алгоритмов идентификации объектов в задачах парковки
транспортного средства. Предложен ряд параметров, по которым будут
идентифицироваться препятствия. Метод, лежащий в основе алгоритма
идентификации, представляет собой нейросетевую структуру.
UDC 629.113.006
Firov N.A., Shkurkin
D.V.
The scientific adviser: PHD, prof. Finaev V.I.
RESEARCH
AND DEVELOPMENT OF ALGORITHMS FOR IDENTIFYING OBJECTS IN THE TASKS PARKING THE
VEHICLE
The paper considers research and development of algorithms for identifying objects in the problems of parking the vehicle. Proposed parameters which will identify the obstacles. The method, which is the basis of the identification algorithm, is a neural network structure. It has been proposed structure of the neural network
identification. Developed an algorithm for optimizing the parameters of the neural
network.
Целью работы
является исследование и разработка алгоритмов идентификации объектов
(препятствий) для повышения эффективности (точности) обнаружения неподвижных
наземных объектов в задачах парковки автомобиля в реальном масштабе времени, а
также выбор наиболее подходящих технических средств к ним.
В соответствии с поставленной
целью необходимо выполнить: исследование существующих
методов идентификации объектов; определение параметров для идентификации
объектов; формирование требований к техническим средствам идентификации; разработка алгоритма идентификации неподвижных
наземных объектов.
Необходимость в использовании подобных систем
обусловлена тем, что наиболее частое возникновение аварийных ситуаций возникает
в случае парковки, когда зона видимости водителя весьма ограничена. Алгоритм
идентификации предназначается для своевременного информирования о положении, размерах и дистанции до препятствий, а
также для предупреждения водителя об опасности, если расстояние до них
становится слишком малым.
|
|
Для решения вышеуказанных задач, наиболее оптимальным решением является применение теории моделирования систем [2], теории искусственного интеллекта [1, 3], теории идентификации и основы алгоритмизации и автоматизации [1].
В статье рассматривается обоснование и актуальность поставленной задачи, предложен ряд параметров, по которым будут идентифицироваться препятствия, сделан обзор существующих методов идентификации препятствий относительно транспортного средства и проведены требования к техническим средствам идентификации препятствий.
Размер, форма, особенности поверхности и положение объектов относительно ТС, которые нужно обнаружить, расстояние между датчиком и объектами, а также условия окружающей среды является ключевыми в выборе подходящих типов датчиков. Для идентификации объектов в пространстве (рис. 1.) необходимо использовать бесконтактные методы измерения, основанные на том, что чувствительный элемент средства измерения не приводится в контакт с объектом измерения.
Рис.1. Обнаружение различных препятствий при изменении параметров ТС
В связи с этим целесообразно использовать двухканальную систему, включающую в себя акустический и оптический методы измерения параметров. Подобное сочетание обусловлено тем, что оптический метод позволяет определять размеры, форму и положения объектов (препятствий) в пространстве относительно транспортного средства в пределах рабочего диапазона, а акустический непосредственно измерять расстояния до этих объектов.
Количество используемых датчиков должно быть подобрано таким образом, чтобы максимально исключить «мертвые зоны», т.е. датчики должны покрывать все пространство движения ТС в его зоне безопасности с максимальным радиусом обнаружения препятствий для обеспечения необходимого контроля в дальнейшем (рис. 2). Как видно, указанное количество и расположение датчиков на корпусе ТС является достаточным для максимально возможного покрывания всего пространства движения ТС. Будем полагать, что угол обзора каждого датчика равен 90º, тогда задавая шаг измерения равный 10º, количество проводимых измерений, приходящихся на каждый отдельный датчик, будет равен 10. При этом полностью исключить мертвые зоны не удастся, но их присутствие в системе никак не повлияет на точность идентификации и не представляет никакой опасности ТС и препятствию.
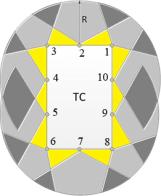
Рис. 2. Зоны покрытия датчиками пространства движения ТС.
Исходя из рис. 2. так же стоит отметить, что область видимости каждого датчика пересекается со смежными областями соседних датчиков, что при измерениях параметров влечет к появлению одинаковых значений, влияющее на точность и быстродействие системы.
Один и тот же угол пересекающегося одного идентифицируемого параметра препятствия его можно определить следующим образом:
![]() (1)
(1)
где ![]() ,
,![]() – углы при измерениях в двух смежных областях видимости датчиков.
– углы при измерениях в двух смежных областях видимости датчиков.
Для решения исследуемой проблематики, предлагается использовать нейроподобные сети идентификации, в качестве идентификатора самообучающей сети применять генетические алгоритмы, структура предложенной модели представлена на рис. 3.
Рис. 3. Структура модели системы идентификации с генетическим алгоритмом оптимизации
Число элементов ![]() входного слоя определяется количеством входных данных,
передающихся от всех датчиков в единицу времени
входного слоя определяется количеством входных данных,
передающихся от всех датчиков в единицу времени
![]()
На вход каждого нейрона поступают массивы данных в виде
![]() ,
,
где i – порядковый номер входного нейрона в сети, j – индексовые значения снимаемого вектора входных переменных в секторе зоны безопасности.
В результате значения с входного слоя поступают на вход скрытого слоя нейронной сети.

Сигналы со скрытого слоя поступают на нейроны ![]() выходного слоя, которые формирует реакции сети. В этом случае
количество нейронов выходного (последнего) слоя равно единице. Этот слой
выводит результаты в виде одномерной матрицы
выходного слоя, которые формирует реакции сети. В этом случае
количество нейронов выходного (последнего) слоя равно единице. Этот слой
выводит результаты в виде одномерной матрицы
W = [![]()
![]()
![]() …
… ![]()
![]() ],
],
в состав которой входят параметры, описывающие положение препятствий относительно ТС и их форму.
Для решения задачи идентификации, необходимо разработать целевую функцию
идентификатора, в качестве которого выступает генетический алгоритм.
Целевая функция представляет собой функцию пересечения повторяющихся значений трех пересекающихся секторов. В общем виде целевую функцию можно представить как:
Ц.Ф. = min (Ai-1, Ai,
Ai+1), (2)
где ![]() =
=![]() ,
, ![]() =
=![]() ,
, ![]() =
=![]()
Введение условия останова алгоритма.
 (3)
(3)
Правило
1: Если хотя бы один
параметр Ai-1= Ai= Ai+1, то следует оставить одно повторяющееся
значение и передать его в выходной одномерный массив.
Правило
2: Если Ai-1≠Ai≠Ai+1, то передать все значения в выходной
одномерный массив.
Выводы: В тексте статьи предложена структура нейронной сети идентификации, определенно количество нейронов во входном, скрытом и выходном слоях. Разработана целевая функция генетического алгоритма, выполняющая задачу устранения повторяющихся значений пересекающихся зон видимости датчиков и преобразованию параллельных входных массивов данных в последовательный выходной массив, что приводит к уменьшению времени вывода результата идентификации, за счет уменьшения обрабатываемых данных, что немаловажно в дальнейшем для обеспечения необходимого быстродействия системы в целом.
Библиографический список
1. Коберси И.С., Белоглазов Д.А. Интеллектуальная адаптивная гибридная обучаемая система управления транспортными средствами. Известия ЮФУ. Технические науки. Тематический выпуск «Методы и средства адаптивного управления в электроэнергетике». – Таганрог: Изд-во ТТИ ЮФУ, 2010, №1 (102). – 260 с., С. 110-117.
2. Финаев В.И. Моделирование при проектировании информационно-управляющих систем: Учебное пособие. - Таганpог: Изд-во ТРТУ, 2002.
3. Коберси И.С., Шадрина В.В. Применение нейронных сетей для управления энергопотреблением. Известия ЮФУ. Технические науки. Тематический выпуск. «Актуальные проблемы производства и потребления электроэнергии». – Таганрог: Изд-во ТТИ ЮФУ, 2008. № 7 (84) – 240 c., С. 190-1964.