Проектирование ИИУС на основании предполагаемых заданий
подводного планирующего зонда
Гагулин
С.В.
Самарский
государственный технический университет, Самара
Подводный
планирующий зонд
Перспективным
методом проведения научно-исследовательских работ в условиях водной среды
является применение планирующих подводных зондов (ПЗ). Подводные планирующие
зонды применяют для размещения в них комплекса измерительной аппаратуры, необходимой для проведения той
или иной научно-исследовательской работы. Основным преимуществом данного метода
является возможность совершать длительные автономные экспедиции в разнообразные
районы Мирового Океана без дополнительной подзарядки электроэнергией,
минимальное количество подвижных механизмов, что обеспечивает надёжность, и
минимальное количество управляемых параметров, что упрощает внутрисистемную
организацию информационно-измерительной системы (ИИУС).
Зонд
представляет из себя планер, управление движением которого осуществляется
изменением плавучести и положения центра тяжести. Зонд снабжён крыльями с
фиксированным положением, в результате обтекания потоком воды на них образуется
подъёмная сила. Чтобы подъёмная сила двигала зонд вперёд, при погружении
создаётся дифферент на нос, при всплытии на корму. Управление
дифферентом осуществляется перемещением подвижной массы, расположенной внутри
зонда, вдоль его оси, в результате чего смещается центр тяжести (ЦТ). Изменение
курса происходит изменением крена ПЗ, который создаётся смещением подвижной
массы перпендикулярно продольной оси корпуса в горизонтальной плоскости [1]. Управление движением зонда, путём синхронного
изменения плавучести и положения ЦТ, осуществляет информационно-измерительная и
управляющая система (ИИУС).
Использование
зондов позволяет решать поисковые и исследовательские задачи разной сложности.
Основными из которых являются:
1)
Научно-исследовательские работы:
- картографирование дна, геологические
исследования, геохимические исследования, исследования в полярных областях;
- изучение различных явлений в океане: тепловые
потоки, внутренние волны, термоклины, сейсмические процессы;
2)
Промышленные работы:
- контроль
подводных инженерных сооружений (буровые платформы, нефте- и газопроводы);
- освоение
биологических ресурсов Мирового Океана (отслеживание перемещения планктонных
полей, оптимизация мест промысла
рыболовных судов);
- исследование
затонувших объектов (подводные, надводные и воздушные суда, археологические
работы).
Перечисленный
круг задач применения ПЗ предполагает сложную информационно-измерительную и управляющую
систему, способную решать нетривиальные задачи в условиях автономного плавания.
При выполнении как научно-исследовательских, так и промышленных работ,
планирующий зонд находится под угрозой столкновения с объектами подводного
мира, что может привести к потере аппарата и срыву поставленных заданий.
Столкновение аппарата возможно с самим объектом изучения, например при контроле
инженерных сооружений, в частности обследовании буровых платформ. Расстояние,
на котором должен находиться ПЗ от изучаемого объекта, определяется разрешающей
способностью измерительной аппараратуры. Также возможно столкновение ПЗ с объектами окружающей среды,
например при поиске затонувших объектов, возможен контакт со скальными породами
дна. Избежать столкновения возможно при надстройке ИИУС в её программной и
аппаратной части, системой по обнаружению, классификации и, при наличии опасности, корректированию курса
ПЗ. Такая система должна максимально ликвидировать эффект неопределённости и
неполного знания относительно окружающей среды. Для ориентирования и
определения параметров препятствий ИИУС должна быть оснащена необходимыми
средствами локации. После обработки сигнала система должна дать однозначный
ответ о дальнейших действиях ПЗ, если опасности нет – продолжить движение, при
возникновении угрозы столкновения,
управляющая часть должна осуществить коррекцию курса, таким образом,
чтобы избежать контакта с препятствием и вернуться к выполнению задания без
потери маршрута.
СУ с
директивными алгоритмами функционирования
В целом
процесс функционирования ПЗ с жесткими алгоритмами системы управления можно
описать следующим образом. Определяется линия сбора данных и горизонты глубин,
между которыми необходимо произвести измерения. После этого из линии сбора
данных формируется траектория движения ПЗ. Для определения функций управляющих
параметров на траектории находятся опорные точки - они являются местами
изменения управляющих параметров и могут привязывать ко времени или событию.
Полученные функции управляющих параметров необходимо передать на планирующий
зонд в виде набора команд, который после их выполнения свяжется с центром
управления для передачи собранной информации и запроса новых команд. Указанный
метод управления обладает такими достоинствами, как быстродействие, малое
потребление ресурсов, к недостатку относится необходимость точной
математической модели отражающей зависимость траектории движения ПЗ от
управляющих параметров. Она должна отвечать таким требованиям как:
- Адекватность;
- Управляющие параметры должны входить в состав входных величин;
- Выходные величины – параметры движения ПЗ, такие как линейная и
угловая скорость по каждой из осей. [8,1]
СУ с
интеллектуальными алгоритмами
Интеллектуальная
ИИУС предполагает наличие сложной вычислительной аппаратуры с развитой
измерительной частью, с высоким потреблением энергии, что в условиях применения
на малогабаритном зонде является нецелесообразным. Для ИИУС с интеллектуальными
алгоритмами управления можно выделить следующие принципы, на основании которых
строится её внутрисистемная организация.
1)
Энергоэффективность – рациональное использование энергетических
ресурсов. Управляемое режимами, перераспределение электроэнергии между
элементами системы, исходя из их потребностей, которые определяют
обстоятельства окружающей среды в данный момент времени.
2)
Функциональная перестройка – функциональная перестройка
компонентов системы на основе самоорганизации, в результате чего система
получает разную реакцию на одинаковые события, и как следствие несколько
вариантов решения одной задачи.
3)
Автономность – самостоятельное, независимое решение
непредусмотренных задач, препятствующих выполнению миссии, на основе
собственного научения.
Условно
интеллектуальная ИИУС
Противоречивые
требования к ИИУС подводного зонда
Системы управления с директивными
алгоритмами не позволяют планировать длительные подводные операции, так как с
течением времени возрастает вероятность потери зонда в связи с возникающими
непредвиденными препятствиями. Интеллектуальные алгоритмы энергоёмки и не
достаточно разработаны. Возможным решением является разработка и применение
условно-интеллектуальной системы управления.
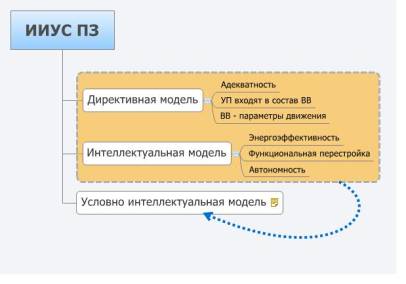
Рисунок 1 – Варианты исполнения ИИУС
ПЗ
Реализация
системы управления выглядит следующим образом: директивные алгоритмы с
динамический обратной связью, с разнообразной реакцией на возникающие
препятствия, не за счёт собственного научения- а за счёт гибкого, на основе
самоорганизации, применения типовых директивных алгоритмов.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Великанов Д.В., Гареев Ш.И., Максимча Р.М. Подводный робот для океанологических исследований // Радиоэлектроника, электротехника и энергетика. Тезисы докладов четырнадцатой международной научно- технической конференции студентов и аспирантов. Москва, 2008. С. 223.