Технические науки/12. Автоматизированные системы управления
на производстве
К.ф.-м.н. Гилев В.М., д.т.н. Саленко С.Д., Слободской
И.В.
Институт теоретической и прикладной механики СО РАН,
Новосибирский государственный технический университет,
Новосибирск, Россия
Автоматизированное
поддержание скорости потока в рабочей части аэродинамической трубы
В работе описывается система
автоматизированного управления скоростью вращения вентилятора аэродинамической
трубы дозвуковых скоростей. С помощью представляемой системы поддерживается
постоянной скорость потока воздуха в рабочей части трубы. Точность поддержания
скорости потока составляет величину не хуже 0,3 м/с.
Введение. На кафедре
Арогидродинамики Новосибирского государственного технического университета для
проведения научных исследований в области аэродинамики, а также для обучения
студентов новым экспериментальным методикам была построена аэродинамическая труба дозвуковых скоростей. Труба
имеет следующие технические характеристики:
- рабочий диапазон скоростей от 0 до
60 м/с;
- диаметр рабочей части – 1,2 м, длина –
2 м;
- мощность привода вентилятора – 165 кВт;
- неравномерность скорости в ядре потока
диаметром 0,8 м не более 0,8%;
- степень турбулентности без турбулизирующих
устройств около 0,3%.
Аэродинамическая труба оснащена четырехстепенным
координатником, позволяющим перемещать измерительный зонд практически по всему
объему рабочей части. Точность перемещения по продольной и поперечной осям –
1 мм, по вертикальной оси – 0.5 мм, по углу b – 0.5°.
Для контроля скорости невозмущенного потока
используется микроманометр, который измеряет перепад между полным давлением на
срезе сопла аэродинамической трубы и атмосферным давлением. Погрешность
измерения скорости на базе 10 м/с составляет не более 0.1 м/с, на
базе 40 м/с составляет не более 0.3 м/с.
Управление экспериментом, сбор, передача,
хранение и первичная обработка экспериментальных данных осуществляется
информационно-вычислительным кластером [1], созданным при выполнении
государственного контракта с Федеральным дорожным агентством № УД 47/182
от «12» октября 2011 г. Схема измерительного комплекса представлена на рис. 1.
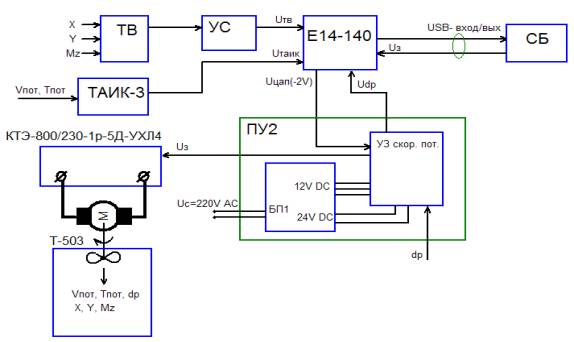
Рис. 1.
Функциональная схема измерительного комплекса
экспериментального
стенда
Ниже
приведена расшифровка сокращений рис. 1:
ТВ –
трехкомпонентные тензометрические весы;
УС – устройство согласования
тензометрических весов;
ТАИК-3 –
термоанемометрический комплекс для измерения температуры и скорости
турбулентных газовых потоков;
ПУ2 –
пульт управления и контроля;
Е14-140 –
измерительный модуль c программным обеспечением
Е-140_2010_08_05, LGraph 2;
СБ –
системный блок (компьютер Intel (R) Celeron
™ CPU 1200 МГц, 576 МБ ОЗУ).
Программное обеспечение осуществляет управление
экспериментальным стендом аэродинамической трубы в течение эксперимента, за
счет формирования сигналов для цепи управления тиристорным приводом аэродинамической
трубы. Программа поддерживает постоянной скорость потока, позволяет проводить
сбор экспериментальной информации и ее первичную статистическую обработку в
реальном масштабе времени, проводить обработку экспериментальных данных с
учетом необходимых для аэродинамического эксперимента поправок и выдавать полученные
данные в табличном и графическом виде.
Программное обеспечение и оборудование должны обеспечивать точность поддержания скорости
потока в рабочей части аэродинамической трубы не менее 0,3 м/с.
Однако при проведении многих экспериментов требуется
более высокая точность поддержания скорости.
С целью улучшения стабильности скорости в рабочей
части трубы были проведены работы по настройке системы поддержания скорости,
подбору оптимальных коэффициентов ПИД-регулятора.
Ниже приведены результаты экспериментов для
окончательного варианта.
При испытаниях для оценки стабильности скорости
в рабочей части стенда эталонный приемник полного статического давления (ППСД)
располагался в рабочей части. Испытания проводились при трех значениях оборотов
вентилятора n1, n2 и п3, соответствующих скоростям V=15, 30 и 45 м/с.
Устанавливались заданные обороты вентилятора n1 и в течение 10 мин. производились отсчеты с интервалом в 1 мин. Такие же испытания проводились для оборотов вентилятора n2 и п3.
Для каждого отсчета при n =
const по показаниям эталонного ППСД рассчитывалась
скорость Vi, затем средняя скорость
 и
и
относительное
среднее квадратическое отклонение
![]()
 , N - число отсчетов.
, N - число отсчетов.
Оценка случайной составляющей относительной
погрешности от нестабильности скорости при доверительной вероятности Р = 0,95 и
объеме измерений > 10 представлялась в виде ![]() .
.
Данные, полученные для каждой заданной скорости,
занесены в Таблицу 1.
Таблица 1. Результаты
оценки стабильности скорости
|
t, мин |
Vi, м/с |
Vср, м/с |
|
|
0 |
14,97 |
|
|
|
1 |
14,99 |
|
|
|
2 |
15,04 |
|
|
|
3 |
14,96 |
|
|
|
4 |
15,00 |
|
|
|
5 |
15,01 |
15,009 |
0,0071 |
|
6 |
15,11 |
|
|
|
7 |
14,96 |
|
|
|
8 |
14,97 |
|
|
|
9 |
14,99 |
|
|
|
10 |
15,10 |
|
|
|
|
|
|
|
|
t, мин |
Vi, м/с |
Vср, м/с |
б ст |
|
0 |
30,04 |
|
|
|
1 |
30,04 |
|
|
|
2 |
30,07 |
|
|
|
3 |
30,04 |
|
|
|
4 |
30,11 |
|
|
|
5 |
30,05 |
30,056 |
0,0018 |
|
6 |
30,02 |
|
|
|
7 |
30,04 |
|
|
|
8 |
30,09 |
|
|
|
9 |
30,05 |
|
|
|
10 |
30,07 |
|
|
|
|
|
|
|
|
t, мин |
Vi, м/с |
Vср, м/с |
б ст |
|
0 |
44,98 |
|
|
|
1 |
45,05 |
|
|
|
2 |
44,99 |
|
|
|
3 |
45,05 |
|
|
|
4 |
45,07 |
|
|
|
5 |
45,02 |
45,020 |
0,0018 |
|
6 |
44,99 |
|
|
|
7 |
45,09 |
|
|
|
8 |
45,02 |
|
|
|
9 |
44,96 |
|
|
|
10 |
44,99 |
|
|
Пересчитав относительную погрешность ![]() из таблицы в
абсолютную находим, что проведенная настройка системы управления обеспечила
поддержание стабильности скорости в рабочей части аэродинамической трубы в диапазоне 15 – 45 м/с с погрешностью не более 0,1 м/с при
доверительной вероятности Р = 0,95.
из таблицы в
абсолютную находим, что проведенная настройка системы управления обеспечила
поддержание стабильности скорости в рабочей части аэродинамической трубы в диапазоне 15 – 45 м/с с погрешностью не более 0,1 м/с при
доверительной вероятности Р = 0,95.
Заключение. Таким образом, в данной работе представлена
система управления и поддержания скорости потока воздуха в аэродинамической
трубе дозвуковых скоростей. Точность поддержания скорости потока составляет величину
не хуже 0,3 м/с.
Данная работа выполнялась при финансовой поддержке Российского фонда фундаментальных
исследований (грант РФФИ № 12-07-00548-а).
1. Гилев
В.М., Батурин А.А., Саленко С.Д., Слободской И.В. Автоматизация
сбора и обработки данных при проведении экспериментов в учебной
аэродинамической трубе // Международный журнал экспериментального образования.
– 2010, – №7. – С. 112–114.