Технічні
науки/12. Автоматизовані системи керування на виробництві
Ковриго Ю.М., Мовчан А.П., Сніжко А.В., Матковський П.Ю.
Національний технічний університет України
«КПІ», Україна
Инженерный метод настройки
каскадной системы регулирования переменной
структуры
Для многих
технологических процессов характерно наличие значительного времени запаздывания
и большого количества возмущений, ограничивающих эффективность функционирования
одноконтурных систем автоматического регулирования (САР).
С целью повышения качества
регулирования в этих случаях используются многоконтурные САР, в частности,
каскадные.
Определение оптимальных
параметров настроек таких систем существенно затруднено сложностью
аналитического решения задачи параметрического синтеза, а также отсутствием
полной информации о действующих на объект параметрических и координатных
возмущениях.
Для выбора оптимальных
настроек предложены приближенные методы, однако, полученные настройки часто
требуют уточнения как при вводе в действие САР, так и в процессе ее
функционирования.
С целью снижения
чувствительности каскадной САР к параметрическим возмущениям и упрощения ее
настройки авторами предложено использовать в корректирующем регуляторе закон
регулирования переменной структуры.
В настоящей статье
рассмотрена структура каскадной системы, в которой в корректирующем регуляторе
используется модификация закона регулирования переменной структуры,
предложенного в работах [1], [2]. Также представлены инженерный метод настройки
такой системы и результаты исследования ее качественных показателей путем
математического моделирования.
Модель объекта управления состоит из
быстродействующей и инерционной части, которые описываются дифференциальными
уравнениями первого порядка с запаздыванием:
![]() . (1)
. (1)
Регулирующее воздействие
корректирующего регулятора формируется по закону:
 , (2)
, (2)
где ![]() – кусочно-постоянная функция.
– кусочно-постоянная функция.
 ,
, ![]() , где
, где ![]() , (3)
, (3)
![]() – сигнал рассогласования на входе
корректирующего регулятора,
– сигнал рассогласования на входе
корректирующего регулятора, ![]() – параметры настройки корректирующего регулятора,
– параметры настройки корректирующего регулятора,
![]() – время выдачи регулирующего воздействия
регулятором.
– время выдачи регулирующего воздействия
регулятором.
Уравнение
стабилизирующего регулятора имеет вид:
![]() , (4)
, (4)
где ![]() – сигнал рассогласования на входе
стабилизирующего регулятора,
– сигнал рассогласования на входе
стабилизирующего регулятора, ![]() – параметр настройки стабилизирующего регулятора.
– параметр настройки стабилизирующего регулятора.
Вначале для объекта
первого порядка с запаздыванием с параметрами ![]() и при наличии ограничения
на динамическую ошибку переходного процесса
и при наличии ограничения
на динамическую ошибку переходного процесса ![]() экспериментально были найдены соотношения для настройки
регулятора с переменной структурой:
экспериментально были найдены соотношения для настройки
регулятора с переменной структурой:
![]() . (5)
. (5)
Затем
для одного из режимов работы каскадной САР при ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() были проведены исследования чувствительности характеристик
САР к вариациям настройки
были проведены исследования чувствительности характеристик
САР к вариациям настройки ![]() .
.
Проведенные
исследования показали, что оптимальная настройка ![]() зависит только от выбора
зависит только от выбора![]() .
.
По полученным
экспериментальным данным была определена зависимость ![]() , представленная на рис.1.
, представленная на рис.1.
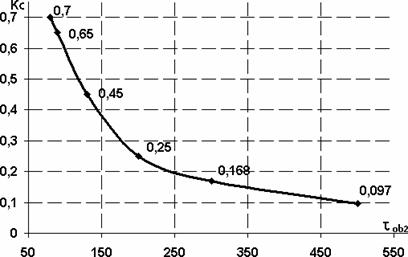
Рис.1.
Зависимость настройки ![]() стабилизирующего регулятора от
запаздывания
стабилизирующего регулятора от
запаздывания ![]() .
.
По кривой ![]() видно, что
экспериментальные данные с достаточной точностью могут быть описаны
уравнением
видно, что
экспериментальные данные с достаточной точностью могут быть описаны
уравнением ![]() . Для нахождения неизвестных a и b использован графический метод
выравнивания и получено выражение для расчета коэффициента передачи
стабилизирующего регулятора:
. Для нахождения неизвестных a и b использован графический метод
выравнивания и получено выражение для расчета коэффициента передачи
стабилизирующего регулятора:
 . (6)
. (6)
|
|
|
|
Рис.2.
Влияние величины |
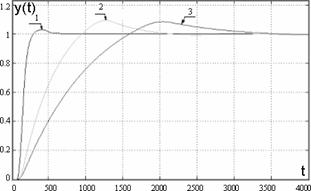
Рис.3.
Влияние величины |
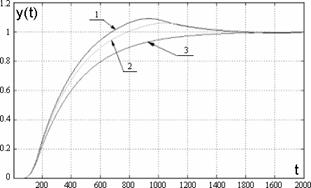
Далее исследовалось влияние параметров объекта на переходные
процессы в САР.
Влияние величины коэффициента передачи объекта ![]() на переходные
характеристики по каналу “задание-выход” показаны на рис.2.
на переходные
характеристики по каналу “задание-выход” показаны на рис.2.
Влияние
постоянной времени объекта ![]() на переходные
характеристики по каналу “задание-выход” показано на рис.3.
на переходные
характеристики по каналу “задание-выход” показано на рис.3.
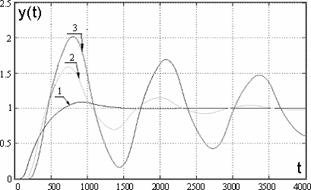
Влияние
запаздывания объекта ![]() на переходные
характеристики по каналу “задание-выход” без коррекции
на переходные
характеристики по каналу “задание-выход” без коррекции ![]() по формуле (6) показано
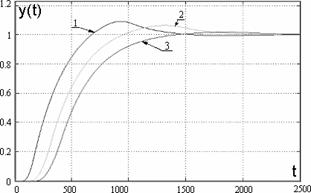
на рис.4, а с коррекцией
по формуле (6) показано
на рис.4, а с коррекцией ![]() на рис.5:
на рис.5:
|
|
|
|
Рис.4.
Влияние величины запаздывания на переходные процессы в САР (без коррекции |
Рис.5.
Влияние величины запаздывания на переходные процессы в САР при наличии
коррекции |
 1)
1)В результате исследований
получен инженерный метод настройки регулятора переменной структуры в каскадной САР,
который предполагает выбор настраиваемых параметров в зависимости от диапазона
изменения параметров объекта:
 (7)
(7)
и расчет ![]() и
и ![]() по формулам (5) и (6).
по формулам (5) и (6).
Предложенный метод
построения и настройки каскадной САР обеспечивает эффективную работу при
изменении параметров объекта управления в диапазоне: ![]() ;
; ![]() ;
; ![]() ;
; ![]() при настройках, получаемых
по соотношениям (6), (7), и расчете коэффициента передачи регулятора переменной
структуры
при настройках, получаемых
по соотношениям (6), (7), и расчете коэффициента передачи регулятора переменной
структуры ![]() согласно (5).
согласно (5).
Выводы
Таким образом,
предложенная структура каскадной САР и инженерные формулы для настройки
позволяют реализовать каскадную систему с заданными показателями качества
переходных процессов, малочувствительную к изменению параметров объекта в
указанных диапазонах, охватывающих весьма значительный класс технологических
процессов. Малая чувствительность САР к вариациям параметров объекта позволяет
получать по приведенным соотношениям настройки, не требующие уточнения при введении
в действие САР и в процессе функционирования объекта.
Література:
1. Уланов
А.Г., Шубладзе А.М. Некоторые
методы построения адаптивных общепромышленных регуляторов // Автоматика и
телемеханика. – 1976. – №4.
2. Загарий Г.И., Шубладзе А.М. Синтез
систем управления на основе критерия максимальной степени устойчивости. – М.:
Энергоатомиздат, 1998. – 104 с.: ил.
Ковриго Ю.М. __________ Мовчан А.П. __________
Снижко А.В. __________ Матковский П.Ю. __________