Технические
науки/12. Автоматизированные системы
управления на производстве
Мовчан А.П., Бунке
А.С.
Национальный технический
университет
«Киевский политехнический институт», Украина
Автоматические регуляторы с антинасыщением
для технологических процессов
Подавляющее
большинство промышленных систем автоматического управления построены с
использованием типовых
пропорционально-интегральных (ПИ) законов. Наличие интегральной составляющей
может в ряде случаев существенно уменьшать качество регулирования, если управляющее
воздействие достигает физических ограничений.
Если
управление достигло верхней границы, а регулятор продолжает интегрировать
сигнал рассогласования, то сигнал на выходе интегратора может принять большое
значение, и, затем, понадобится много времени для компенсации этой накопленной
ошибки [1], [2]. Это и является причиной ухудшения качества регулирования.
Открыто
ряд способов для борьбы с этим явлением. Один из них – отключение интегратора
при достижении выходной величиной интегратора граничного значения. Другой
способ заключается в использовании условного интегрирования, когда интегратор
работает только при наличии малой ошибки.
В
работе [2] предложен нелинейный интегральный закон управления, который
предусматривает отключение интегральной составляющей при достижении выходной
величины интегратора некоторого заданного уровня, а также сформулирована задача
синтеза регулятора с интегральной составляющей для линейного многомерного
объекта в пространстве состояний. Анализ системы сделан на примере скалярной
стационарной системы без запаздывания с неизвестным постоянным возмущением, на
основании которого разработаны рекомендации для параметрического синтеза
автоматической системы регулирования (АСР) с антинасыщением.
Но
использование таких эффективных регуляторов существенно ограничено отсутствием
методов построения и инженерных методик расчета их настроек для наиболее
распространенных объектов с запаздыванием в управлении.
Известно,
что динамика преобладающего большинства технологических объектов может быть
описана с достаточной точностью дифференциальным уравнением первого порядка с
запаздыванием [3]. Учитывая это, авторами была сформулирована задача построения
параметрически оптимальной АСР с антинасыщением
для объекта первого порядка с запаздыванием.
Математическая
постановка задачи имеет вид:
Уравнение объекта:
x`(t)=aּx(t)+bּu(t-τ)+v0
Уравнение
регулятора:
u(t)=-Kрּe(t)-(1/Ти)ּq(t)
![]()
Где Кр
– коэффициент передачи регулятора, Ти – время
интегрирования регулятора, β – дополнительный параметр настройки антинасыщения, Umin, Umax – ограничения
на управляющее воздействие, x(t) –
выход объекта, u(t) – управляющее воздействие, a и b – параметры объекта,
τ – время запаздывания, v0 –
постоянное возмущение, q(t) – выход
нелинейного интегратора, e(t) – сигнал рассогласования.
Критерий параметрической
оптимизации АСР:
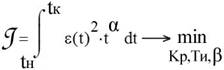
Где tн, tк – пределы интегрирования, tα
–
акцентирующая функция, которая задает качество регулирования, α –
постоянный коэффициент, величина которого определяет качественные показатели
переходного процесса.
Структурная
схема параметрически оптимальной АСР с антинасыщением изображена на рис. 1.
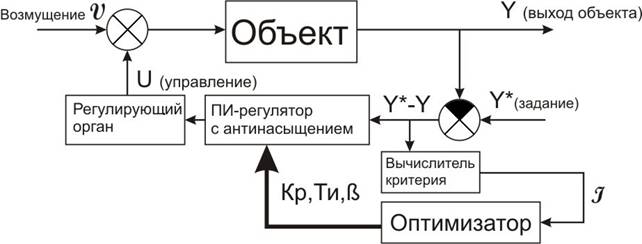 Рис.1.
Структурная схема АСР с антинасыщением.
Рис.1.
Структурная схема АСР с антинасыщением.
Данная
структурная схема построена на базе одноконтурной АСР. После нанесения
ступенчатого возмущения, вычислитель критерия считает критерий качества
переходного процесса и на его базе оптимизатор делает следующий шаг методом
нулевого порядка.
Для
выполнения исследований была разработана программа, которая моделирует схему,
изображенную на рис.1. Было выполнено исследования предложенного закона
регулирования с нелинейным интегратором.
Для
оптимизации используется метод циклического покоординатного спуска с проверкой ограничений [3]. При выполнении
исследований найдены рекомендуемые значения шагов алгоритма оптимизации для
параметров регулятора:
∆Кр=0,05ּКр; ∆Ти=0,1ּТи
∆β=0,1ּmax{Umin,Umax}
Критерий останова оптимизации: Eps=|I(k)-I(k-1)|≤0.001
Интерфейс
программы представлен на рис.2.
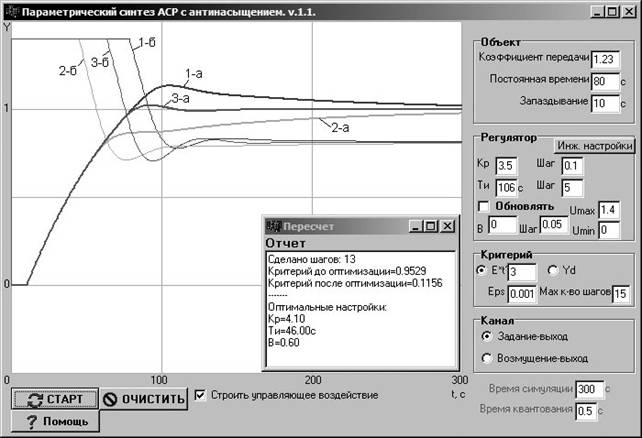
1-а – переходный процесс без отключения
интегральной составляющей с оптимальными настройками ПИ – регулятора, 1-б –
управляющее воздействие, 2-а –
переходный процесс с отключением интегральной составляющей до оптимизации, 2-б
– управляющее воздействие, 3-а – переходный процесс с отключением интегральной
составляющей после оптимизации настроек ПИ-регулятора с антинасыщением,
3-б – управляющее воздействие.
Рис.2. Интерфейс
программы, переходные процессы в одноконтурной АСР.
Как
видно из графиков – отключение интегральной части практически ликвидирует
перерегулирование (динамический заброс) в переходном процессе. Оптимизация
настроек регулятора с учетом отключения интегральной составляющей за 10-15
итераций (при начальных настройках по инженерным, либо другим, более точным,
методикам) позволяет достигнуть практически апериодического переходного
процесса, что очень важно для определенных объектов управления, где
перерегулирование недопустимо.
Выводы
1. Предложена
АСР на базе типового ПИ-алгоритма с включением блока антинасыщения
интегральной части и автоматизированной параметрической оптимизацей,
которая выполняется по инициативному сигналу как при введении в действие АСР,
так и в процессе эксплуатации, при изменении нагрузки или появлении
параметрических возмущений другой природы.
2. Разработаны
рекомендации по выбору постоянных параметров алгоритмов, от которых зависит
конечное качество управления, и количество итераций в процедуре оптимизации. Для
оптимизации параметров АСР используется метод циклического покоординатного
спуска [3]. Исследования показали, что введение параметра β, от которого
зависит момент выключения интегратора, также позволяет улучшить качество
переходного процесса. В частности, после оптимизации, динамический заброс
уменьшается на 80%, а время регулирования в 1,5
раза по сравнению с АСР без антинасыщения.
3. Разработанное
программное обеспечение может быть использовано для синтеза реальных АСР, а
также для исследования моделей.
Литература
1.
Anderson,
B. D. O., and Moore, J. B., 1971, Linear Optimal Control (
2. Острем К., Виттенмарк Б. Системы управления с ЭВМ: пер. с англ. – М.:
Мир, 1987 – 480 с., ил.
3. Методы
оптимизации в теории управления: Учебное пособие / И.Г. Черноруцкий.
– СПб.: Питер 2004. – 256 с.: ил.