Бондаренко В.И.
НТУУ „КПИ им. Игоря Сикорского”, г. Киев, Украина
Аналитический
регулятор возбуждения синхронного генератора
Автоматические регуляторы возбуждения (АРВ) сильного действия имеют постоянные настройки, задаваемые внутри некоторой зоны, общей для областей статической устойчивости выбранных режимов работы энергетической системы. Преимущества регуляторов данного типа заключаются в относительной простоте их реализации и настройке. К недостаткам можно отнести незначительную точность регулирования напряжения и невозможность обеспечивать желаемую степень устойчивости в зависимости от режима работы.
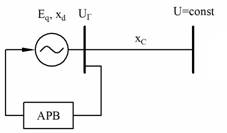
Рисунок
1. Простейшая регулируемая система «генератор – шины бесконечной мощности»
Для устранения вышеупомянутых недостатков необходимо использовать адаптивные регуляторы возбуждения.
Дання работа посвящена реализации аналитических адаптивных регуляторов синхронных генераторов (СГ). Аналитическими будем называть такие регуляторы, в которых имеется возможность заранее установить однозначную связь между внешними контролируемыми параметрами, характеризирующими состояние ЭЭС, и адаптируемыми коэффициентами.
Рассмотрим простейшую регулируемую систему, изображенную на рис.1, которая описывается системой дифференциальных уравнений [1]:
![]() , (1)
, (1)
![]() , (2)
, (2)
 . (3)
. (3)
Первые два уравнения при ![]() описывают переходные
процессы в простой нерегулируемой электрической системе. Третье уравнение
описывает АРВ в виде передаточной функции, где
описывают переходные
процессы в простой нерегулируемой электрической системе. Третье уравнение
описывает АРВ в виде передаточной функции, где ![]() - постоянная времени
возбудителя, с;
- постоянная времени
возбудителя, с; ![]() - постоянная времени
регулятора, с.
- постоянная времени
регулятора, с.
Установившийся режим в рассматриваемой
системе (рис. 1) можно описать с помощью следующих независимых параметров ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , где:
, где: ![]() - напряжение на шинах
бесконечной мощности,
- напряжение на шинах
бесконечной мощности, ![]() - напряжение на шинах
генератора,
- напряжение на шинах
генератора, ![]() - мощность генератора,
- мощность генератора,
![]() - эквивалентное
сопротивление системы, которое является «долгоживущим» параметром [2],
- эквивалентное
сопротивление системы, которое является «долгоживущим» параметром [2], ![]() - синхронное
сопротивление СГ по продольной оси.
- синхронное
сопротивление СГ по продольной оси.
Очевидно, что наиболее часто изменяемым
параметром из приведенных выше является мощность ![]() , которая изменяется в течение суток согласно суточному
графику нагрузки. Отсюда следует что необходимо синтезировать такой АРВ,
который бы в зависимости от
, которая изменяется в течение суток согласно суточному
графику нагрузки. Отсюда следует что необходимо синтезировать такой АРВ,
который бы в зависимости от ![]() изменял свои параметры
для поддержания
изменял свои параметры
для поддержания ![]() на заданном уровне,
обеспечивая заданную степень устойчивости исследуемой системы. Пренебрегая
инерционностью регулятора и возбудителя выражение передаточной функции такого
АРВ запишем в виде:
на заданном уровне,
обеспечивая заданную степень устойчивости исследуемой системы. Пренебрегая
инерционностью регулятора и возбудителя выражение передаточной функции такого
АРВ запишем в виде:
![]() , (4)
, (4)
где
![]() - сигнал отклонения по
напряжению СГ,
- сигнал отклонения по
напряжению СГ, ![]() - току ротора,
- току ротора, ![]() - скольжению.
- скольжению.
Используя передаточную функцию АРВ (4) на основании системы уравнений (1-3) можно получить следующие значения коэффициентов усиления адаптивного регулятора СГ:
 , (5)
, (5)
 , (6)
, (6)
 , (7)
, (7)
![]() , (8)
, (8)
где
![]() - желаемая степень
устойчивости,
- желаемая степень
устойчивости, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() - частные производные
по режимным параметрам [1].
- частные производные
по режимным параметрам [1].
Выводы.
Синтезирован адаптивный аналитический
АРВ СГ, значения коэффициентов усиления каналов которого вычисляются по
формулам (5-8). Полученный регулятор обеспечивает желаемую степень
устойчивости во всех режимах и имеет
малую ошибку регулирования по напряжению. Коэффициенты ![]() и
и ![]() являются постоянными и
не зависящими от
являются постоянными и
не зависящими от ![]() . Изменение режима работы исследуемой электропередачи влияет
только на
. Изменение режима работы исследуемой электропередачи влияет
только на ![]() и
и ![]() .
.
Перечень ссылок
- Веников В.А. Переходные электромеханические процессы в электрических системах. Учебник для электроэнергетических специальностей вузов. – М.: «Высшая школа», 1978. – 415 с.,ил.